The gps should be connected to the Hardware serialport on the second ardu.
MWii connects to I2C-gps via I2C.
GPS integration
-
jevermeister

- Posts: 708
- Joined: Wed Jul 20, 2011 8:56 am
- Contact:
Re: GPS integration
OK, I forgot to set the mag orientation but i think it is too cold right now, I lost GPS-Fix after a minute and it seems, that the copter is not trying to come home.
@alex, if I use pitch/roll on the tx, will it stop RTH or only disturb it?
I only have a fly radius of 15m to fly, is the area to small?
Nils
@alex, if I use pitch/roll on the tx, will it stop RTH or only disturb it?
I only have a fly radius of 15m to fly, is the area to small?
Nils
Re: GPS integration
Excuse me, but if I had a Arduino Mega and a GPS connected directly via serial could I have all facility that has implemented via i2c_gps?

Re: GPS integration
Hi EOSbandi
my question is the same as from Magnetron. is the development of code only for the i2c-gps or is there also a further development for users with a serial GPS (flyduino-gps-bob).
I'm just a little unsure because i just bought the serial gps.
will it be possible to adapt the gps from paul to i2c-gps via an extra arduino pro mini?
thanx for some answers
my question is the same as from Magnetron. is the development of code only for the i2c-gps or is there also a further development for users with a serial GPS (flyduino-gps-bob).
I'm just a little unsure because i just bought the serial gps.
will it be possible to adapt the gps from paul to i2c-gps via an extra arduino pro mini?
thanx for some answers

Re: GPS integration
Hi,
i2c gps dev is paused right now in favor of the WinGui. Once WinGui is out, i'll return to i2c. Currently the implementation is simply replaces serial gps. Later improvements will be transfered to the serial code. Keep in mind that the main gps code will be common and the goal is to provide same functionality for serial and i2c gps, as long as the resources on the Atmega328 allows it.
Advanced code such as waypoint navigation or scripted nav won't fit into an atmega328 so for that you will definitely need an i2cgps or an atmega2560 based fc.
i2c gps dev is paused right now in favor of the WinGui. Once WinGui is out, i'll return to i2c. Currently the implementation is simply replaces serial gps. Later improvements will be transfered to the serial code. Keep in mind that the main gps code will be common and the goal is to provide same functionality for serial and i2c gps, as long as the resources on the Atmega328 allows it.
Advanced code such as waypoint navigation or scripted nav won't fit into an atmega328 so for that you will definitely need an i2cgps or an atmega2560 based fc.
Re: GPS integration
But eventually this solution with two pro mini's or two nano's (which i can get for 2x18$, which is probably cheaper that the mega boards) will be implemented right? Btw which i2c gps is good for the job & where did you guys buy it?
-
NikTheGreek

- Posts: 348
- Joined: Thu Dec 08, 2011 4:17 pm
- Location: Greece
- Contact:
Re: GPS integration
msev wrote:Btw which i2c gps is good for the job & where did you guys buy it?
I'm not sure if i understand correctly your question
They are using the 2nd arduino to "convert" any GPS to I2C gps this way....
RX & TX from GPS connected to RX&TX of the arduino .
PIN No2 is RX and No3 is TX as you can see in the pic
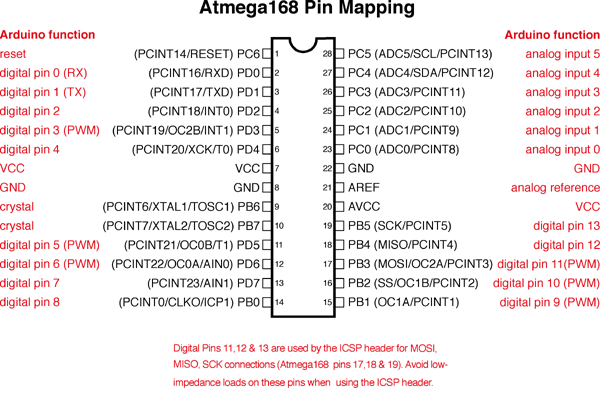
And pins 27 & 28
Pin 27 is Analog4 is SDA
Pin 28 is Analog5 is SCL
must be connected to the "main " arduino board in SDA & SCL using PULL UP resistors like this
http://hackaday.com/2011/11/08/a-simple ... -capacity/
Re: GPS integration
Hey ppl
Today i tested the dev_20120203 in the field. we´ve -20°C but sunshine, so i tested.
Hardware used:
- Flyduino Mega
- Drotek DOF 10 with the MS561101BA Baro
- FMP04 GPS modul
So i tested the RTH function, but on the Desk i saw a "problem?". The distance to home is increasing without moving the copter. i thought its okay, but on the field my copter goes crazy after i switched to RTH. Leans very hard forward and flies away. i tested it many times, with mag calibartion and so on. so what can i do, to get it working? in the GUI the senors are all okay.
what can i check, if its maybe not okay?
Second Question: wich port on the mega is used for status led? i need to know if my gps have a fix.
Today i tested the dev_20120203 in the field. we´ve -20°C but sunshine, so i tested.
Hardware used:
- Flyduino Mega
- Drotek DOF 10 with the MS561101BA Baro
- FMP04 GPS modul
So i tested the RTH function, but on the Desk i saw a "problem?". The distance to home is increasing without moving the copter. i thought its okay, but on the field my copter goes crazy after i switched to RTH. Leans very hard forward and flies away. i tested it many times, with mag calibartion and so on. so what can i do, to get it working? in the GUI the senors are all okay.
what can i check, if its maybe not okay?
Second Question: wich port on the mega is used for status led? i need to know if my gps have a fix.
Re: GPS integration
Hey,
have you fix the GPS bugs ?
have you fix the GPS bugs ?
Re: GPS integration
Hi LuFa
i have the same problem. can you give a hint?
what should be fixed? (serial FMP04 GPS with flyduino Mega!!!)
i have the same problem. can you give a hint?
what should be fixed? (serial FMP04 GPS with flyduino Mega!!!)
Re: GPS integration - Working
EOSBandi wrote:Hi !
Today I tested the GPS RTH mode. And I can confirm that it's working...
There is one bug in the code which must be corrected.. the orientation of the Pitch and Roll corrections are wrong, but changing the following line fixes it...
In MultiWii.ino change thisCode: Select all
errorAngle = constrain(2*rcCommand[axis] + GPS_angle[axis],-500,+500) - angle[axis] + accTrim[axis]; //16 bits is ok here
to thisCode: Select all
errorAngle = constrain(2*rcCommand[axis] - GPS_angle[axis],-500,+500) - angle[axis] + accTrim[axis]; //16 bits is ok here
The GPS I used is a MTK chipset LS20033 set for 5Hz update rate at 115200 bps.
Gyro : ITG3205, Acc: BMA150 with 8G setting, Mag: HMC5883L, Baro: BMP085
(Just to note, RTH tests were done in Alt hold mode.... which is working perfectly...)
Things to improve :
1. DO not trust the position when GPS is got its fix, move home position setting to an aux switch or store home position when arming. (The received position could change significantly after the first fix)
(for a quick fix I added AUX4 high position to store home position.)
change this line
Code: Select all
if (GPS_fix_home == 0) {
to this
Code: Select all
if (rcData[AUX4]>1800) {
2. Add magnetic inclination to the mag hold calculations, this will reduce the diameter of the circles around home position. (will do that)
3. Add a PID contoller to the gps calculations, so it will not overshoot when coming home from long distances with max RTH speed. (will try but, perhaps a little help needed)
4. Just for showing off, turn the copter's head towards the home position when RTH (will do that)
Here is the video of the test...http://www.youtube.com/watch?v=pJJKG6uWqv4
Hey ,
No Proplem
here you can see how to fix the bugs .
Re: GPS integration
So for gps support you need an additional arduino to the main flight control arduino...And the main flight control must be one of the mega boards right? And the secondary can be a pro mini or nano?..The main arduino can't be a 328p board right... Hope I understand correctly now.
-
NikTheGreek
- Posts: 348
- Joined: Thu Dec 08, 2011 4:17 pm
- Location: Greece
- Contact:
Re: GPS integration
msev wrote:So for gps support you need an additional arduino to the main flight control arduino...And the main flight control must be one of the mega boards right? And the secondary can be a pro mini or nano?..The main arduino can't be a 328p board right... Hope I understand correctly now.
Yes
No
Yes
No
Main and second board simple arduino .
Re: GPS integration
My i2c board is really simple!..
But It have
- I2C
- Serial rx for gps
- Status LED
It even have 4 motorpins and ppm inpin.
But It have
- I2C
- Serial rx for gps
- Status LED
It even have 4 motorpins and ppm inpin.
- Attachments
-
Re: GPS integration
Wow its really simple even I could do that ...Do you maybe have a rough schematic, or maybe just a picture of the underside? And maybe a parts list 
-
NikTheGreek
- Posts: 348
- Joined: Thu Dec 08, 2011 4:17 pm
- Location: Greece
- Contact:
Re: GPS integration
Make a search for Barebone Arduino OR breadboard Arduino and you will find a lot.... 
Re: GPS integration
Hey guys,
I am also trying to use the GPS function. I use the EM-411 serial GPS on the Arduino Mega 2560 board.
Its connected on serial 2 on the mega board. I have switched
this function with AUX2. Its a three position switch on my Futaba T10 transmitter. The low position is GPS OFF.
The MID position is GPS position HOLD an the HIGH position is GPS RETURN to HOME.
Now my question. How do i store the HOME position or is it automaticly stored when you
having a GPS fix. Can someone tell me what to do.
Best regards
Jasper
Keep up the good work.
I am also trying to use the GPS function. I use the EM-411 serial GPS on the Arduino Mega 2560 board.
Its connected on serial 2 on the mega board. I have switched
this function with AUX2. Its a three position switch on my Futaba T10 transmitter. The low position is GPS OFF.
The MID position is GPS position HOLD an the HIGH position is GPS RETURN to HOME.
Now my question. How do i store the HOME position or is it automaticly stored when you
having a GPS fix. Can someone tell me what to do.
Best regards
Jasper
Keep up the good work.
-
NikTheGreek
- Posts: 348
- Joined: Thu Dec 08, 2011 4:17 pm
- Location: Greece
- Contact:
Re: GPS integration
OUPS........ 
I'm taking this errors when i'm trying to compile the MultiWii_dev_20120203
Code: Select all
MultiWii_dev_20120203.cpp: In function 'void loop()':
MultiWii_dev_20120203:689: error: 'I2C_GPS_ADDRESS' was not declared in this scope
MultiWii_dev_20120203:689: error: 'I2C_GPS_STATUS' was not declared in this scope
MultiWii_dev_20120203:690: error: 'I2C_GPS_STATUS_3DFIX' was not declared in this scope
MultiWii_dev_20120203:695: error: 'I2C_GPS_COMMAND' was not declared in this scope
MultiWii_dev_20120203:695: error: 'I2C_GPS_COMMAND_SET_WP' was not declared in this scope
MultiWii_dev_20120203:696: error: 'I2C_GPS_COMMAND_ACTIVATE_WP' was not declared in this scope
MultiWii_dev_20120203:699: error: 'I2C_GPS_STATUS_NEW_DATA' was not declared in this scope
MultiWii_dev_20120203:703: error: 'I2C_GPS_DISTANCE' was not declared in this scope
MultiWii_dev_20120203:722: error: 'I2C_GPS_COMMAND' was not declared in this scope
MultiWii_dev_20120203:722: error: 'I2C_GPS_COMMAND_SET_WP' was not declared in this scope
MultiWii_dev_20120203:723: error: 'I2C_GPS_COMMAND_ACTIVATE_WP' was not declared in this scopeI'm taking this errors when i'm trying to compile the MultiWii_dev_20120203
Re: GPS integration
NikTheGreek wrote:OUPS........Code: Select all
MultiWii_dev_20120203.cpp: In function 'void loop()':
MultiWii_dev_20120203:689: error: 'I2C_GPS_ADDRESS' was not declared in this scope
MultiWii_dev_20120203:689: error: 'I2C_GPS_STATUS' was not declared in this scope
MultiWii_dev_20120203:690: error: 'I2C_GPS_STATUS_3DFIX' was not declared in this scope
MultiWii_dev_20120203:695: error: 'I2C_GPS_COMMAND' was not declared in this scope
MultiWii_dev_20120203:695: error: 'I2C_GPS_COMMAND_SET_WP' was not declared in this scope
MultiWii_dev_20120203:696: error: 'I2C_GPS_COMMAND_ACTIVATE_WP' was not declared in this scope
MultiWii_dev_20120203:699: error: 'I2C_GPS_STATUS_NEW_DATA' was not declared in this scope
MultiWii_dev_20120203:703: error: 'I2C_GPS_DISTANCE' was not declared in this scope
MultiWii_dev_20120203:722: error: 'I2C_GPS_COMMAND' was not declared in this scope
MultiWii_dev_20120203:722: error: 'I2C_GPS_COMMAND_SET_WP' was not declared in this scope
MultiWii_dev_20120203:723: error: 'I2C_GPS_COMMAND_ACTIVATE_WP' was not declared in this scope
I'm taking this errors when i'm trying to compile the MultiWii_dev_20120203
Did you added the defs to the def.h file as it described in http://code.google.com/p/i2c-gps-nav/so ... ipplet.txt ?
Re: GPS integration
3Dfresh wrote:Hey guys,
I am also trying to use the GPS function. I use the EM-411 serial GPS on the Arduino Mega 2560 board.
Its connected on serial 2 on the mega board. I have switched
this function with AUX2. Its a three position switch on my Futaba T10 transmitter. The low position is GPS OFF.
The MID position is GPS position HOLD an the HIGH position is GPS RETURN to HOME.
Now my question. How do i store the HOME position or is it automaticly stored when you
having a GPS fix. Can someone tell me what to do.
Best regards
Jasper
Keep up the good work.
where is the source for the gps position hold mode? have i missed something??
for setting the home position look at the top (post from LuFa) of the page. there is the answer!
Re: GPS integration
PosHold is not implemented yet at the MW side, but there is support for it in i2c_gps code.
Re: GPS integration
Till itt will be implemented, RTH coda can be used for position hold, if you put Home Setup to a switch, you can redefine home position during flight and it will work as a position hold. Of course, the original home position will be overrided.
BR
Adrian
BR
Adrian
-
Alexinparis
- Posts: 1630
- Joined: Wed Jan 19, 2011 9:07 pm
Re: GPS integration
jevermeister wrote:OK, I forgot to set the mag orientation but i think it is too cold right now, I lost GPS-Fix after a minute and it seems, that the copter is not trying to come home.
@alex, if I use pitch/roll on the tx, will it stop RTH or only disturb it?
I only have a fly radius of 15m to fly, is the area to small?
Nils
Hi,
In GPS mode, you still have the stick control.
The GPS correction only adds some inclination in the right direction.
Re: GPS integration
Hi EOSBandi
This is Melih from Flyron.com
I 'm designing different I2C GPS boards(i'm calling them as Navigatron) since few months with this old I2C Gps idea
The boards tested and ready since few days and i was searching for better code ideas.
Then today i saw your great code that simulating a real I2C device
Here is the latest Navigatron board design, they will be in stocks in 1-2 days.


Now, i have some questions about your GPS integration, because i'm also using MultiWii firmware for my quadro.
1- I tested the Ground_Course and Ground_Speed variables but didnt work. "atof" function generating 32 bit floats but you are saving them into 16 bit. am i right?
2- Will you move the ground_course value to low registry address like other values? , (current address 0x9C)
3- I will glad to send some Navigatron boards to you, may i?
Thank you very much for keeping it open
Melih
This is Melih from Flyron.com
I 'm designing different I2C GPS boards(i'm calling them as Navigatron) since few months with this old I2C Gps idea
The boards tested and ready since few days and i was searching for better code ideas.
Then today i saw your great code that simulating a real I2C device
Here is the latest Navigatron board design, they will be in stocks in 1-2 days.
Now, i have some questions about your GPS integration, because i'm also using MultiWii firmware for my quadro.
1- I tested the Ground_Course and Ground_Speed variables but didnt work. "atof" function generating 32 bit floats but you are saving them into 16 bit. am i right?
2- Will you move the ground_course value to low registry address like other values? , (current address 0x9C)
3- I will glad to send some Navigatron boards to you, may i?
Thank you very much for keeping it open
Melih
Re: GPS integration
Hi Melih,
Thanks for looking into my code.
1. Ground speed and ground course should work, you are right, it's atof but it is multiplied by 10 then auto casted to int16. Which supposed to be a simple truncation (this is why there a *10 to keep the .1 precision.) However both parameters are requires GPGSA frames from the GPS. Did you check that your gps is outputting such frames ?
2. It's at the end of the register set because it was added later, and I did not wanted to broke multiwii code. In paralell with gps nav code rehauling i'll most likely will update the i2cgps code too, and then i'll group gps values in the register set.
3. I appriciate that, i'll send you a PM
Regards,
Andras
Thanks for looking into my code.
1. Ground speed and ground course should work, you are right, it's atof but it is multiplied by 10 then auto casted to int16. Which supposed to be a simple truncation (this is why there a *10 to keep the .1 precision.) However both parameters are requires GPGSA frames from the GPS. Did you check that your gps is outputting such frames ?
2. It's at the end of the register set because it was added later, and I did not wanted to broke multiwii code. In paralell with gps nav code rehauling i'll most likely will update the i2cgps code too, and then i'll group gps values in the register set.
3. I appriciate that, i'll send you a PM
Regards,
Andras
Re: GPS integration
Hi Andras,
1. Yes, i just understand the idea. Maybe the problem was my GPS simulator(HappyKillMore's simulator software) , i was detect similar problems at the past. Today i will test it with real GPS signal.
2. Good to hear that. Because i guess most of user will use it without WP algorithms. I will modify the code for 0x11 is course and maybe some extras for other GPS values before WP array. I will share the mods here for your information. Today i will fly with my quadro, i will try your GPS code too if i can finish the integration.
3. It is a pleasure for me
Have a nice sunday
Melih
1. Yes, i just understand the idea. Maybe the problem was my GPS simulator(HappyKillMore's simulator software) , i was detect similar problems at the past. Today i will test it with real GPS signal.
2. Good to hear that. Because i guess most of user will use it without WP algorithms. I will modify the code for 0x11 is course and maybe some extras for other GPS values before WP array. I will share the mods here for your information. Today i will fly with my quadro, i will try your GPS code too if i can finish the integration.
3. It is a pleasure for me
Have a nice sunday
Melih
Re: GPS integration
Hey,
I have see in the newest dev a box named GPSHOLD does GPS Position Hold now also work ?
Thanks a lot
I have see in the newest dev a box named GPSHOLD
Thanks a lot
Re: GPS integration
Hi Andras,
I'm using Arduino 1.0 for I2C GPS Board and Arduino0022 for Host code.
The host stop to working in few seconds because of I2C problem. I guess the probem is the wire library , because I didnt upload your wire.h and wire.c patches into arduino 1.0. Because it is giving errors if i replace the wire.cpp file with wire.c (and wire.h) Can you explain the patching? will i replace it or add into the original files?
Thanks
Melih
I'm using Arduino 1.0 for I2C GPS Board and Arduino0022 for Host code.
The host stop to working in few seconds because of I2C problem. I guess the probem is the wire library , because I didnt upload your wire.h and wire.c patches into arduino 1.0. Because it is giving errors if i replace the wire.cpp file with wire.c (and wire.h) Can you explain the patching? will i replace it or add into the original files?
Thanks
Melih
Re: GPS integration
Hi !
Not wire, but twi... Patches are against 1.0 arduino code for the i2c board side... Just go to the libraries/Wire/utility folder and replace twi.c and twi.h with the ones that are provided along with the i2c-gps-nav code.
On the host side if you are using multiwii, you don't have to patch anything, since MultiWii uses it's own implementation of i2c protocol.
Regards,
Andras
Not wire, but twi... Patches are against 1.0 arduino code for the i2c board side... Just go to the libraries/Wire/utility folder and replace twi.c and twi.h with the ones that are provided along with the i2c-gps-nav code.
On the host side if you are using multiwii, you don't have to patch anything, since MultiWii uses it's own implementation of i2c protocol.
Regards,
Andras
Re: GPS integration
LuFa wrote:Hey,
I have see in the newest dev a box named GPSHOLD
Thanks a lot
Code it not yet there, it's just a preparation on the GUI side dor future poshold implementation.
Re: GPS integration
hi
i just uploaded the dev 20120225
after waiting some minutes i had 7 sats in gui gps display. but no special status-led pattern to signalize gps-fix.
is that a bug or an undocumented feature?
i just uploaded the dev 20120225
after waiting some minutes i had 7 sats in gui gps display. but no special status-led pattern to signalize gps-fix.
is that a bug or an undocumented feature?
-
Alexinparis
- Posts: 1630
- Joined: Wed Jan 19, 2011 9:07 pm
Re: GPS integration
Hi,
I tested today the same problem.
it's a small bug:
=>
(because GPS_numSat could go directly from 0 to 5 or more without being at 4)
I tested today the same problem.
it's a small bug:
Code: Select all
if (GPS_fix == 1 && GPS_numSat == 4) {=>
Code: Select all
if (GPS_fix == 1 && GPS_numSat > 3) {(because GPS_numSat could go directly from 0 to 5 or more without being at 4)
Re: GPS integration
hi alex
thanks. thats the bug now it works fine.
where in the code do you set the GPS_fix == 1 ?
cant find that. only for me to understand that
thanks. thats the bug
where in the code do you set the GPS_fix == 1 ?
cant find that. only for me to understand that

Re: GPS integration
Hi MelihK,
Saw your post on the Navigatron I2C gps, any idea when it's likely to be available for purchase, I can't find it on the flytron.com site?
Also any thoughts on integrating Sonar too, seems like these are the last 2 major sensor inclusions for MultiWii and are missing from most all in one boards e.g the Crius SE and Quadrino (both of which I use).
With this I can participate in testing at last!
Saw your post on the Navigatron I2C gps, any idea when it's likely to be available for purchase, I can't find it on the flytron.com site?
Also any thoughts on integrating Sonar too, seems like these are the last 2 major sensor inclusions for MultiWii and are missing from most all in one boards e.g the Crius SE and Quadrino (both of which I use).
With this I can participate in testing at last!
Re: GPS integration
@ Mbrak:
In MultiWii tab line 734.
Its easy to find when you use the arduino find function.
In MultiWii tab line 734.
Its easy to find when you use the arduino find function.
Re: GPS integration
Hey ,
are there any plans for GPS position Hold in the next time ?
It would be nicer than Coming home for gps tests
are there any plans for GPS position Hold in the next time ?
It would be nicer than Coming home for gps tests
Re: GPS integration
KeesvR wrote:@ Mbrak:
In MultiWii tab line 734.
Its easy to find when you use the arduino find function.
hi
i dont think so!
line 734 is imho a query!
i'd like to know where the variable is set. like "GPS_fix = 1;"
the only part i could found is a bit up in the code in the i2c_GPS part. but i have a serial gps from flyduino!
Re: GPS integration
I'm sorry, I thought you where looking for the line to change.
Maybe 736, I'm no coder but I see serial GPS.
For me its all Chinese
Maybe 736, I'm no coder but I see serial GPS.
For me its all Chinese
Re: GPS integration
mbrak wrote:hi alex
where in the code do you set the GPS_fix == 1 ?
cant find that. only for me to understand that
I think it's in GPS.ino file, line 72,
"else if (param ==6) {GPS_fix = string[0] > '0';}"
Re: GPS integration
thank you
that's exactly what I was looking for.
that's exactly what I was looking for.
Re: GPS integration
Ive just tried the latest dev code using a flyduino with gps on serial 2, it shows a fix in the gui with 9 sats but if I move the copter around the garden,
the distance from home remains at zero is this a bug or isnt the serial gps working yet ?
Im sure the distance from home used to change on an earlier version
the distance from home remains at zero is this a bug or isnt the serial gps working yet ?
Im sure the distance from home used to change on an earlier version
Re: GPS integration
I have just unplugged the gps while its all running and when I plugged it back in the distance home came up 
Just need to test fly now see if it works
Just need to test fly now see if it works
Re: GPS integration
Any thoughts about writing a "geofence" feature like the ardupilot one?
Creating a "virtual box" made of gps cordinates where you fly by wire within the "box". As soon as hitting the geofence, controller fly back to the starting coordinate by it self full autonomously. Would be nice for practice.
Creating a "virtual box" made of gps cordinates where you fly by wire within the "box". As soon as hitting the geofence, controller fly back to the starting coordinate by it self full autonomously. Would be nice for practice.
-
rbirdie001
- Posts: 178
- Joined: Fri Apr 01, 2011 10:32 pm
- Location: Czech Republic, Prague
Re: GPS integration
Hi all!
I just built I2C GPS module according to EOSBandi and it communicates perfectly! Great work!
It's really a charm how easy and cheap it is now to connect GPS to any board with ATmega328.
I can't find how to manualy set home position and unfortunately autoset position isn't very accurate.
Does the solution already exist or not yet? I'm very bad coder so I don't dare to try it alone...
Additional question: For testing I used an old 1Hz GPS module - do I have any chance that it will work well, or faster (10Hz) module is necessary?
Or even easier question - did anyone tested 1Hz module with a success?
Thanks!
Roman
I just built I2C GPS module according to EOSBandi and it communicates perfectly! Great work!
It's really a charm how easy and cheap it is now to connect GPS to any board with ATmega328.
I can't find how to manualy set home position and unfortunately autoset position isn't very accurate.
Does the solution already exist or not yet? I'm very bad coder so I don't dare to try it alone...
Additional question: For testing I used an old 1Hz GPS module - do I have any chance that it will work well, or faster (10Hz) module is necessary?
Or even easier question - did anyone tested 1Hz module with a success?
Thanks!
Roman
Re: GPS integration
It does exist in the code, in the multiwii pde:
if (rcData[AUX4]>1800) {
change this to the preferred channel and pwm value.
BR
Adrian
if (rcData[AUX4]>1800) {
change this to the preferred channel and pwm value.
BR
Adrian
Re: GPS integration
Just a little question,
why the manual set home position RC channel/pwm configuration is not available in GUI ?
Regards,
Synthex
why the manual set home position RC channel/pwm configuration is not available in GUI ?
Regards,
Synthex
Re: GPS integration
Because the whole GPS code is an experiment right now.....
Re: GPS integration
But GPS HOME and GPS HOLD are available in GUI ...
So the manual set home position is only available in I2C GPS ?
So the manual set home position is only available in I2C GPS ?
Re: GPS integration
Checkboxes are available in GUI not the complete function.....for future development......
Right now yes, since I2C GPS stores HOME position in the secondary processor. It is only called for calculations with this line.
Right now yes, since I2C GPS stores HOME position in the secondary processor. It is only called for calculations with this line.
-
Alexinparis
- Posts: 1630
- Joined: Wed Jan 19, 2011 9:07 pm
Re: GPS integration
Hi,
GPS RTH and PH is now fully implemented for Serial GPS (not I2C) in the current code
GPS RTH and PH is now fully implemented for Serial GPS (not I2C) in the current code