I recently upgraded my quad to use MW2.4. Initially my compass would not work (and consequently the navigation functions too), until I commented out the following line in def.h:
Code: Select all
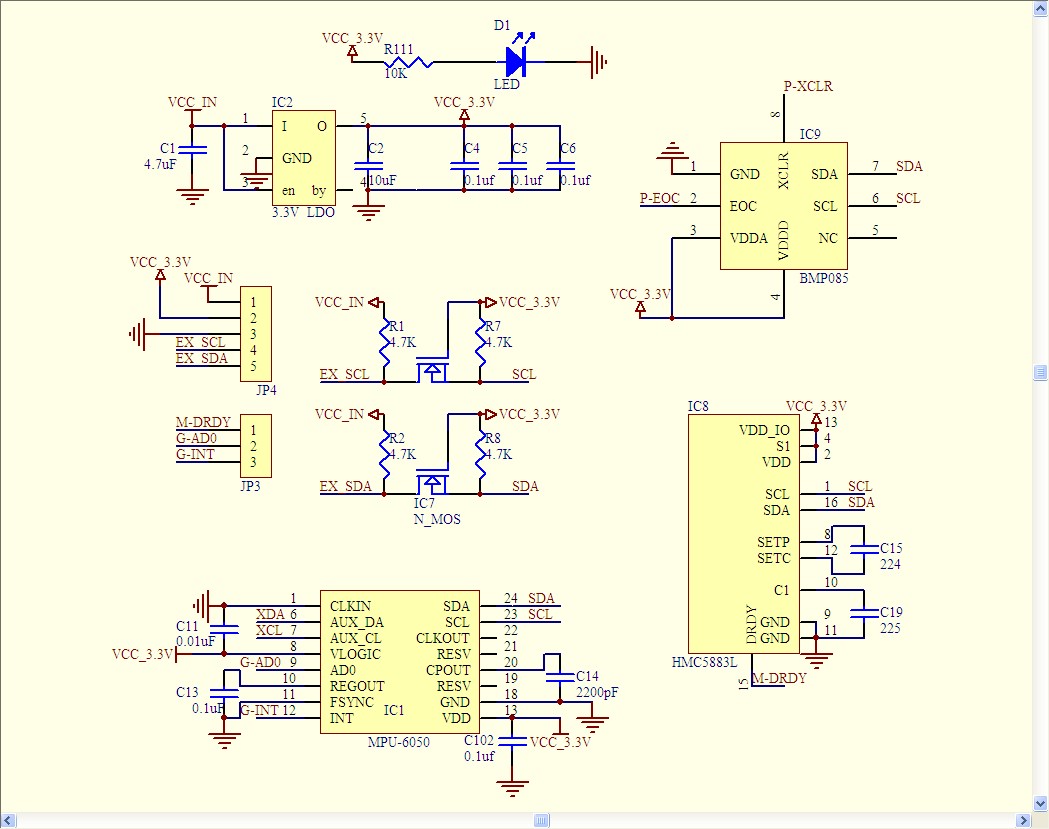
#define MPU6050_I2C_AUX_MASTER // MAG connected to the AUX I2C bus of MPU6050Apparently, the magnetometer is on the regular I2C bus, and not attached to the auxiliary input on the MPU6050 as assumed in the code. This is confirmed when using the Arduino I2C scanner sketch from the Ardino Playground.
Matt
{kind=link}