Hi Int77 / everyone else,
I agree in some point about home arrow and heading... but, because home arrow is two chars now it won´t fit as nicely as before at the screen center!
Because of this and wanting to really change the screen together with new implementations on this dev like Volume flight etc , I saw most of the videos online about this particular case.
I found that most use the home arrow indicator on many different places as well as heading. After some flight tests I asked myself:
- What do you really need at the center on an extreme visible place and what´s more important for the pilot??
1- RC link;
2-Flight mode;
3-Autopilot ability in case of emergency.
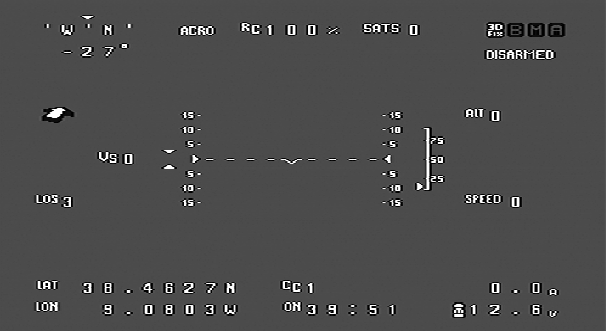
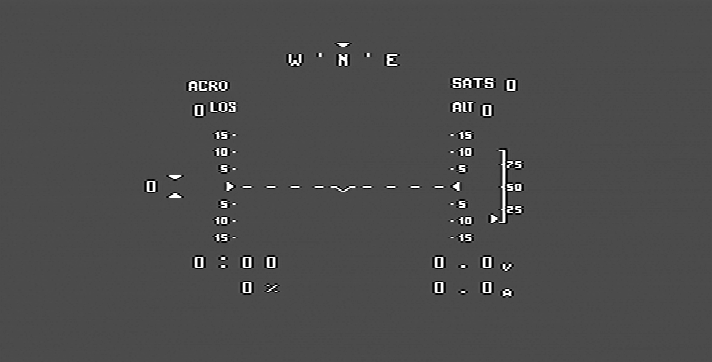
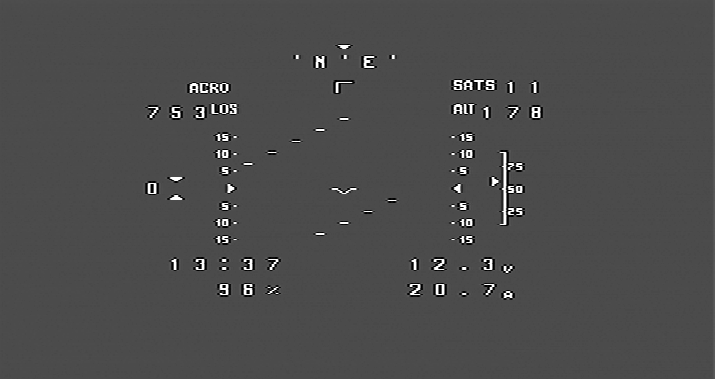
Heading is nice to have as reference for the pilot on another case of satellite lost to find way back... but only few pilots are able to really take it into account when they start they´r flight. So, in this case it should be as well on the top and in this case I found the left top spot the best one to implement it for default. Also made it smaller to free up the screen and found that with current resolution it is exactly the same.
Using the 180° option (set on GUI) it will now behave as the MWii Gui showing -180<0>180° (this also make´s more sense and easier to read at least is what I think...) with 360° option it will be as before.
Now... to balance the screen with new implementations like the new throttle indicator and the above mentioned two chars arrow I found the default the best place to be because pilot can easily look at it in some point if lost without loosing the horizon etc. The same for Altitude, LOS, and Speed, they are on visible accessible places (in my opinion

)
Coordinates at bottom left corner, followed by current and time (both On and Fly) followed by instant consumption and Batt voltage. Due to the amount of warnings able to be set, most of the data is not so critical at this time for the pilot to be always looking at, but ... we sure need it on screen!
Bottom line and like you said, the user can always set them to whatever he likes better if these default places that I found really balanced to fly with are not so suitable in they´r case.
I understand that we all have different brains that respond differently to certainly colors, spots, warning blink frequencies, etc. Because of this we have them all user configurable at this time.
This is why we are not coding to just one or two guys... we make it for everyone and we try to always have this in mind together with natural evolution that is most of the times difficult to keep up.
I hope you understand my points regarding your thoughts about the new up coming release. We really try to make this for everyone and we truly dedicate lot´s of hours of our free time to it but sometimes is hard... Also the Team ATM is just me and Carlo no work was done by the other members because lack of time and probably no interest in continuing developing this OSD... Very hard work for two none coders if you get my point

Anyway, we truly hope that you all have wonderful time flying with it.
Cheers,
-KV
PS: I forgot to mention that I also thought about pilots that don´t use the full sensors and in this case it does not matter GPS related data, HEADING, etc. And they just have lot´s of fun flying FPV with just a ACC on they´r boards... Sensors present/active are now on the left and start counting from the right to the left etc etc ... I sure forgot to mention lot´s of stuff that I took into account but that´s OK! We will see after the release the users acceptance to it

For now our main concern will be only with the Cycle time and screen update rate, because everything else should just be fine for now. Although all your thoughts and suggestions are in truth taken into account as always. Even when does not look like they are

PS1: I also forgot to mention that we really need to manage memory because we really need to try to keep up the evolution on MWii, because of this some functions that could be really better need to stop developing to give room to other new´s to come...









{kind=link}