Airplane mode
Re: Airplane mode
Okay - that makes sense. Having differential is not as important as having flapperons for landing, so seems like I can have say AUX1 trigger flapperon mix and then my transmitter will take care of the mixing to the actual flaps (wired directly to the receiver).
Re: Airplane mode
macinr wrote:copterrichie wrote:This would be a very interesting implementation: https://store.diydrones.com/Kit_MPXV700 ... 2dp-01.htm
I have seen tons of differential pressure sensors on ebay for less then 10 bucks the the above comes with everything needed.
I did my best to sift through this thread but did not see anything with regards to using airspeed sensors to adjust the rate of corrective action?
My interest is within the realm of Dynamic Soaring sailplanes... currently the record is 498mph, just this past monday a bunch of people were flying 450+... more at http://www.rcgroups.com/forums/showthre ... 4&page=169
In any case - some people have experimented using single axis gyros from helicopters but I got to thinking that someone must be using a MultiWii board for airplane stabilization, and then a quick google search led me to this thread. I was happy to see the current code supports dual ailerons and flaps.
using a gps unit, dynamic soaring is done by defining 2 waypoints and flying "Lyapunov Vectors".
but i am in doubt if the current pid stuff is well enough thought out.
also the mw behaviour of adding low pass filtering everywhere may have an end when flying at dynamic soaring speeds.
it will be an experiment - but with a quite high possibility to damage the glider.
i will try it out ... at much lower speeds to begin with.
Re: Airplane mode
Rctimer sells the mpxv700 speed sensor for 14$ including shipping. Got myself 2.
Nice to see someone work on airplane code.
One suggestion.
The servo code is soft-pwm and not hardware generated. This is jittery since worst case every interrupt may delay the signal. The quadros all use hardware generated pwm to avoid this jitter, they use it at 490 hz instead of the about 50 hz a servo needs. Now we can simply modify the prescaler by factor 8 to go from 490 to 60 hz and generate the servo signals. This works nicely om 16 bit timers, somehow on 10 bit ones , but not on 8 bit ones (bad resolution).
What you think ?
Nice to see someone work on airplane code.
One suggestion.
The servo code is soft-pwm and not hardware generated. This is jittery since worst case every interrupt may delay the signal. The quadros all use hardware generated pwm to avoid this jitter, they use it at 490 hz instead of the about 50 hz a servo needs. Now we can simply modify the prescaler by factor 8 to go from 490 to 60 hz and generate the servo signals. This works nicely om 16 bit timers, somehow on 10 bit ones , but not on 8 bit ones (bad resolution).
What you think ?
Re: Airplane mode
hey would you please link me the "finished" software, i have been going through the forum and cannot find any , i have a skywalker falcon and a multiwii pro with MTK GPS
Re: Airplane mode
Airplane is included in V2.2 in MWii Download area
Setup guide here.
http://fotoflygarn.blogspot.com/2012/03/how-to-setup-multiwii-airplane-same.html
Airspeed is not included yet.
If it's the dev with RTH you can find latest Dev here. (stable Beta)
https://multiwii.googlecode.com/svn/bra ... 130322.rar
Dicussed in a separte thread
Airplane mode RTH
viewtopic.php?f=7&t=2456
Greats
Patrik
Setup guide here.
http://fotoflygarn.blogspot.com/2012/03/how-to-setup-multiwii-airplane-same.html
Airspeed is not included yet.
If it's the dev with RTH you can find latest Dev here. (stable Beta)
https://multiwii.googlecode.com/svn/bra ... 130322.rar
Dicussed in a separte thread
Airplane mode RTH
viewtopic.php?f=7&t=2456
Greats
Patrik
-
surf_akinys
- Posts: 19
- Joined: Wed Jun 05, 2013 9:47 pm
Re: Airplane mode
Hi,
I am playing with 2m Piper CUB, FW_Nav_130322 and HK Crius AIO v2 board http://www.hobbyking.com/hobbyking/stor ... duct=31138
I used #define AIRPLANE #define CRIUS_AIO_PRO_V1 and all things looks good, but...
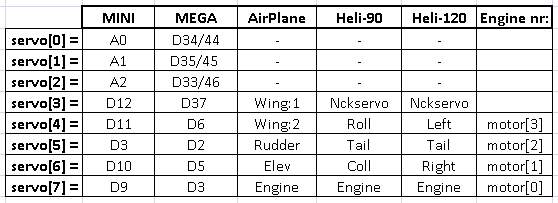
this board do not have D37 (servo[3] from http://2.bp.blogspot.com/-VDI3u_0fQDw/T ... Servos.png) , so it is imposible to setup flaps without rerouting wing1 servo to another pin.
After browsing def.h I am confused and I am not shure where to change pinmode for servo[3] because servos in def.h named from 1 to 8 (not from 0 to 7), defs for MEGA, defs for CRIUS AIO.....
Please help me to point where exactly to do this.
Gediminas
I am playing with 2m Piper CUB, FW_Nav_130322 and HK Crius AIO v2 board http://www.hobbyking.com/hobbyking/stor ... duct=31138
I used #define AIRPLANE #define CRIUS_AIO_PRO_V1 and all things looks good, but...
this board do not have D37 (servo[3] from http://2.bp.blogspot.com/-VDI3u_0fQDw/T ... Servos.png) , so it is imposible to setup flaps without rerouting wing1 servo to another pin.
After browsing def.h I am confused and I am not shure where to change pinmode for servo[3] because servos in def.h named from 1 to 8 (not from 0 to 7), defs for MEGA, defs for CRIUS AIO.....
Please help me to point where exactly to do this.
Gediminas
Re: Airplane mode
Enable #define MEGA_HW_PWM_SERVOS in config.h and then servo pins are: 44.45.46.11,12,6,7,8. All these pins are available on AIO board, and additionally you get precision and jitter free servo signals. Pins 44,45,46 are used for gimbal and camera. Pins 11,12,6,7 are for servos, and pin 8 for motor.
-
surf_akinys
- Posts: 19
- Joined: Wed Jun 05, 2013 9:47 pm
Re: Airplane mode
thanks but helped not so mutch:
after #define MEGA_HW_PWM_SERVOS both wings are now on D11 and D12, but throttle still on D3, elevator ant rudder dissapeared (checked by connecting servo to pins 44-46 and 2,5-10). on 44-46 pwm egzists, but no reaction for rudder or elevator moving (in mwiiconf I see movement). on other pins no pwm. gps on s2 still working.
after #define MEGA_HW_PWM_SERVOS both wings are now on D11 and D12, but throttle still on D3, elevator ant rudder dissapeared (checked by connecting servo to pins 44-46 and 2,5-10). on 44-46 pwm egzists, but no reaction for rudder or elevator moving (in mwiiconf I see movement). on other pins no pwm. gps on s2 still working.
Re: Airplane mode
surf_akinys wrote:thanks but helped not so mutch:
after #define MEGA_HW_PWM_SERVOS both wings are now on D11 and D12, but throttle still on D3, elevator ant rudder dissapeared (checked by connecting servo to pins 44-46 and 2,5-10). on 44-46 pwm egzists, but no reaction for rudder or elevator moving (in mwiiconf I see movement). on other pins no pwm. gps on s2 still working.
I'm having the exact same problem, were you able to fix it?
Re: Airplane mode
disq wrote:surf_akinys wrote:thanks but helped not so mutch:
after #define MEGA_HW_PWM_SERVOS both wings are now on D11 and D12, but throttle still on D3, elevator ant rudder dissapeared (checked by connecting servo to pins 44-46 and 2,5-10). on 44-46 pwm egzists, but no reaction for rudder or elevator moving (in mwiiconf I see movement). on other pins no pwm. gps on s2 still working.
I'm having the exact same problem, were you able to fix it?
I went ahead and merged latest regular Multiwii code from git. I will probably regret it later but it seems to work now. D3:Thr, D6:Rud, D7:Elv, D11/D12:Ail
-
surf_akinys
- Posts: 19
- Joined: Wed Jun 05, 2013 9:47 pm
Re: Airplane mode
after looking at http://spreadsheets.google.com/pub?key= ... GPkA&gid=0
i made a changhe in def.h in section #if defined(MEGA)
#define SERVO_4_PINMODE pinMode(7,OUTPUT); // new - alt TILT_ROLL
#define SERVO_4_PIN_HIGH PORTH |= 1<<4;
#define SERVO_4_PIN_LOW PORTH &= ~(1<<4);
now wing1 is on D7, wing2 on D6 and everything seems to work.
i made a changhe in def.h in section #if defined(MEGA)
#define SERVO_4_PINMODE pinMode(7,OUTPUT); // new - alt TILT_ROLL
#define SERVO_4_PIN_HIGH PORTH |= 1<<4;
#define SERVO_4_PIN_LOW PORTH &= ~(1<<4);
now wing1 is on D7, wing2 on D6 and everything seems to work.
Re: Airplane mode
Does anyone use PPMSUM in airplane mode?
I'm using Crius AIO Pro and it works in multicopter mode, but not with airplane.
I'm using Crius AIO Pro and it works in multicopter mode, but not with airplane.
Re: Airplane mode
Confirmed working on V2.2 & Latest Dev.
With this changes in config.h
#define AIRPLANE
#define CRIUS_AIO_PRO_V1
#define SERIAL_SUM_PPM ROLL,PITCH,THROTTLE,YAW,AUX1,AUX2,AUX3,AUX4,8,9,10,11 //For Robe/Hitec/Futaba
On Dev versions you can move PPM pin to Throttle who is pinned out.
//#define PPM_ON_THROTTLE
/Patrik
With this changes in config.h
#define AIRPLANE
#define CRIUS_AIO_PRO_V1
#define SERIAL_SUM_PPM ROLL,PITCH,THROTTLE,YAW,AUX1,AUX2,AUX3,AUX4,8,9,10,11 //For Robe/Hitec/Futaba
On Dev versions you can move PPM pin to Throttle who is pinned out.
//#define PPM_ON_THROTTLE
/Patrik
Re: Airplane mode
I somehow missed PPM_ON_THROTTLE, it works now!
Re: Airplane mode
Hi all,
I have been using airplane mode on my SkyWalker for a couple months now and it has been working flawlessly.
I have a question, is there any heading hold mode? What will happen if I activate MAG?
Angle mode stabilizes the rudder but not enough for real heading hold over long periods of time.
Thanks!
Exyator
I have been using airplane mode on my SkyWalker for a couple months now and it has been working flawlessly.
I have a question, is there any heading hold mode? What will happen if I activate MAG?
Angle mode stabilizes the rudder but not enough for real heading hold over long periods of time.
Thanks!
Exyator
Re: Airplane mode
I haven't tested but it should work.
My plane don't have rudder so please test and report.
My plane don't have rudder so please test and report.
Re: Airplane mode
Hello guys.
I'm from Russia and speak english bad. So i can't understand, what should i do to my airplane come back to me (to home) when it lost signal from my TX(or when i switch off it). Help me please. I have got crius multiwii, gps, i2c gps, software version 2.2 installed on my plane. Help me please.. )
I'm from Russia and speak english bad. So i can't understand, what should i do to my airplane come back to me (to home) when it lost signal from my TX(or when i switch off it). Help me please. I have got crius multiwii, gps, i2c gps, software version 2.2 installed on my plane. Help me please.. )
Re: Airplane mode
I did hack MultiWii 2.1 on couple of airplanes using simple 328 + 6050 boards.
The first thing that I had to hack was:
- Disable disarm once armed ... since the stick position for disarm, make sense on a copter (throttle is never zero on a copter) ... while an airplance should be able to glide with any possible position on roll/pitch/yaw without causing disarm.
- Make a switch for restart gyro calibration ... I have my problem to place in a steady place a airplane once the battery is placed in
- Other that I did forget or are not so important ... like the dual horizon mode, for have normal fly (level) and hovering (automatically) using a 3D airplane.
Are any of these points inside the latest 2.2 for Airplanes ?
The first thing that I had to hack was:
- Disable disarm once armed ... since the stick position for disarm, make sense on a copter (throttle is never zero on a copter) ... while an airplance should be able to glide with any possible position on roll/pitch/yaw without causing disarm.
- Make a switch for restart gyro calibration ... I have my problem to place in a steady place a airplane once the battery is placed in
- Other that I did forget or are not so important ... like the dual horizon mode, for have normal fly (level) and hovering (automatically) using a 3D airplane.
Are any of these points inside the latest 2.2 for Airplanes ?
Re: Airplane mode
I always use ARM via AUX on planes to avoid unintended Disarm.
You can calibrate gyros vith the TxSticks.
(Thro & Elevator LOW + Yaw Left ) => Gyro cal
The LED will blink for a short while to indicate calibration.
Check out Hamburgers exelent StickConfig Summary.
MultiWii-StickConfiguration-22_v0-577215664.pdf
You can calibrate gyros vith the TxSticks.
(Thro & Elevator LOW + Yaw Left ) => Gyro cal
The LED will blink for a short while to indicate calibration.
Check out Hamburgers exelent StickConfig Summary.
MultiWii-StickConfiguration-22_v0-577215664.pdf
Re: Airplane mode
I have other solution for arming/disarming.
I added one counter in software (work only in plane mode), then reset this counter at arm, and increase by 1 in each RC loop if throttle stick is above MINCHECK.
Then if counter value is higher than 500 I block disarming possibility.
Now you can normally arm/disarm via sticks, but after 10 seconds from arm, the disarming is not possible. Only way to disarm after this time is power off, but this is not a problem because you can stop motor even in armed state. You can do checks/test before take off (arming/disarming) is possible.
I added one counter in software (work only in plane mode), then reset this counter at arm, and increase by 1 in each RC loop if throttle stick is above MINCHECK.
Then if counter value is higher than 500 I block disarming possibility.
Now you can normally arm/disarm via sticks, but after 10 seconds from arm, the disarming is not possible. Only way to disarm after this time is power off, but this is not a problem because you can stop motor even in armed state. You can do checks/test before take off (arming/disarming) is possible.
Re: Airplane mode
Mis wrote:I have other solution for arming/disarming.
I added one counter in software (work only in plane mode), then reset this counter at arm, and increase by 1 in each RC loop if throttle stick is above MINCHECK.
Then if counter value is higher than 500 I block disarming possibility.
Now you can normally arm/disarm via sticks, but after 10 seconds from arm, the disarming is not possible. Only way to disarm after this time is power off, but this is not a problem because you can stop motor even in armed state. You can do checks/test before take off (arming/disarming) is possible.
More or less is what I did ... once it is armed, it can't be disarmed anymore.
I can always unplug battery or press reset on control board in case of disarm need
Re: Airplane mode
PatrikE wrote:I always use ARM via AUX on planes to avoid unintended Disarm.
You can calibrate gyros vith the TxSticks.
(Thro & Elevator LOW + Yaw Left ) => Gyro cal
The LED will blink for a short while to indicate calibration.
Check out Hamburgers exelent StickConfig Summary.
MultiWii-StickConfiguration-22_v0-577215664.pdf
If I use the stick (that move my control surface on the plan) ... for start calibration, I start with the vibration noise of moving servos ... not a nice way to reset gyro calibration
I hacked the MW 2.1 that every time when the board is not armed, every time I switch from stabilize to pass-throw mode, then gyro calibration kick in.
This is working fine for me.
Re: Airplane mode
Romeo84 wrote:Hello guys.
I'm from Russia and speak english bad. So i can't understand, what should i do to my airplane come back to me (to home) when it lost signal from my TX(or when i switch off it). Help me please. I have got crius multiwii, gps, i2c gps, software version 2.2 installed on my plane. Help me please.. )
https://multiwii.googlecode.com/svn/bra ... 130322.rar
I think it's still under devolopment.

{kind=link}
Re: Airplane mode
hi
using dev 1551 with crius aio pro in my twinstarII. works great so far. only the elevator is correcting in the wrong direction if in gyro or acc mode.
the elevator itself is working well in passthru. only the gyro or acc moves the elevator to the worng direction. an example: plane nose is comming down to earth and the rudder is moving more down. same to the upper side.
this is effecting only the elevator. how can i fix this?
thx. michael
p.s. found it myself... invert servo in gui and in tx. now it works... juhuuuuu
using dev 1551 with crius aio pro in my twinstarII. works great so far. only the elevator is correcting in the wrong direction if in gyro or acc mode.
the elevator itself is working well in passthru. only the gyro or acc moves the elevator to the worng direction. an example: plane nose is comming down to earth and the rudder is moving more down. same to the upper side.
this is effecting only the elevator. how can i fix this?
thx. michael
p.s. found it myself... invert servo in gui and in tx. now it works... juhuuuuu
Re: Airplane mode
hi
it is normal that the servo values are only stored in eeprom after clicking "save" when you are in live mode?
if not in live mode the values are not stored! after clicking "read" the default values are present.
is this a bug ore an undocumented feature?
it is normal that the servo values are only stored in eeprom after clicking "save" when you are in live mode?
if not in live mode the values are not stored! after clicking "read" the default values are present.
is this a bug ore an undocumented feature?
Re: Airplane mode
The settings is only sent to FC while it's in live mode.
If you don't press save the settings is lost in next reboot.
It makes it possible to regret changes of servos without resetting the rest of the Eeprom Settings.
If you do change in offline mode the gui will read back the last saved settings in live mode.
All changes in offline is just graphical.
Summary
-Go online.
-Adjust servo settings.
-If you are satisfied Press save Button to save to Eeprom else reboot FC.
-Go offline.
Use the Export to file function to save a file with your default servo settings.
Add the settings to config.h and it will load as default after a reset from Gui.
If you don't press save the settings is lost in next reboot.
It makes it possible to regret changes of servos without resetting the rest of the Eeprom Settings.
If you do change in offline mode the gui will read back the last saved settings in live mode.
All changes in offline is just graphical.
Summary
-Go online.
-Adjust servo settings.
-If you are satisfied Press save Button to save to Eeprom else reboot FC.
-Go offline.
Use the Export to file function to save a file with your default servo settings.
Add the settings to config.h and it will load as default after a reset from Gui.
Airplane mode
Hi Patrik
Great thanks for Explantation ! Now it is much clearer as before
Is it in your scope to implement a easier Way to setup a aileron Differential ? Till now i have to Code the values for min- max of each aileron in the config.h
It would be great if the min- max values are also editable from GUI for each Channel
Br Michael
Great thanks for Explantation ! Now it is much clearer as before
Is it in your scope to implement a easier Way to setup a aileron Differential ? Till now i have to Code the values for min- max of each aileron in the config.h
It would be great if the min- max values are also editable from GUI for each Channel
Br Michael
Re: Airplane mode
Hi,
just a question: i try to figure out where to plug in the servos and the motor from my fixed wing...
I ve searched the forum and find some advices, but they do not apply to my board...
any help would be great...
i own the hobby king multiwii pro with gps... its a mega...
the advices and guides are always for multirotor devices, not for plane...
actual connection from my graupner mx20 hott is working, applied is the plane mod from patrickE
but servos on plane do not move... even if armed... what are the correct pins?
this is the board: http://semmel018.bplaced.net/filemanager/cache/b/4bda38236f34dad6450cc14080c6b3ca.jpg
thanks in advance,
bigcheese
just a question: i try to figure out where to plug in the servos and the motor from my fixed wing...
I ve searched the forum and find some advices, but they do not apply to my board...
any help would be great...
i own the hobby king multiwii pro with gps... its a mega...
the advices and guides are always for multirotor devices, not for plane...
actual connection from my graupner mx20 hott is working, applied is the plane mod from patrickE
but servos on plane do not move... even if armed... what are the correct pins?
this is the board: http://semmel018.bplaced.net/filemanager/cache/b/4bda38236f34dad6450cc14080c6b3ca.jpg
{kind=link}
thanks in advance,
bigcheese
Re: Airplane mode
Hello guys,
can you please advise which boards can run ArduPLANE NG?
Crius
AIOP
Multiwii
Multiwii pro
i think the cheapest solution would be the following from Ebay: Crius + Ublox GPS + GPS I2C for around 48$ - can this run ArduPlaneNG?
thanks.
can you please advise which boards can run ArduPLANE NG?
Crius
AIOP
Multiwii
Multiwii pro
i think the cheapest solution would be the following from Ebay: Crius + Ublox GPS + GPS I2C for around 48$ - can this run ArduPlaneNG?
thanks.
Re: Airplane mode
Wrong forum but AIOP works with ArduPlaneNG.
Re: Airplane mode
@Bigcheese
you can find info about the setup here.
http://fotoflygarn.blogspot.com/2012/03/how-to-setup-multiwii-airplane-same.html
you can find info about the setup here.
http://fotoflygarn.blogspot.com/2012/03/how-to-setup-multiwii-airplane-same.html
Re: Airplane mode
thanks patrick-i think i habe already tried it... i assume d2 5 and 3 for fixed wing...
willl try this again-but where in the code could i verify this?
willl try this again-but where in the code could i verify this?
Last edited by bigcheese on Wed Oct 02, 2013 8:54 pm, edited 1 time in total.
Re: Airplane mode
search in def.h. for
there you will find
pinMode(34,OUTPUT)
there you will find
Code: Select all
#define SERVO_1_PINMODE
.
.
.
.Re: Airplane mode Servo setup
Hi
First post of many to come...
I've been confused by different connection details for my flying wing(z-84 mini phantom) with promini.
Connection diagrams on Multiwii Connect wing L to A0 and wing R to A1. No motor out. And i've had real trouble tuning PID. Wing keeps oscillating in pitch even with P = 1.6.
I have however found this: On wiki: http://www.multiwii.com/wiki/index.php?title=Config.h#Servos_configuration
So from this it seems than Lwing should be D12 and Rwing D11 correct? The only thing I need now is the correct input from RC list...
Regards
First post of many to come...
I've been confused by different connection details for my flying wing(z-84 mini phantom) with promini.
Connection diagrams on Multiwii Connect wing L to A0 and wing R to A1. No motor out. And i've had real trouble tuning PID. Wing keeps oscillating in pitch even with P = 1.6.
I have however found this: On wiki: http://www.multiwii.com/wiki/index.php?title=Config.h#Servos_configuration
General rules:
SERVO1 is always used as Camstab PITCH servo (except HEXA on promini with A0_A1_PIN_HEX)
SERVO2 is always used as Camstab ROLL servo (except HEXA on promini with A0_A1_PIN_HEX)
SERVO3 is always used as CAMTRIG servo or traditional FLAPS servo
SERVO8 is always used as Motor output (if no MOTOR1 output is used for motor control)
SERVOS 4..7 are used depending on coptertype:
Flying Wing : 4-left wing, 5-right wing
Airplane : 4-left wing, 5-right wing, 6-rudder, 7-elevator
SingleCopter : 4,5-side servos, 6-front, 7-rear
DualCopter : 5-Pitch servo, 6-Roll servo
BI : 5-left servo, 6-right servo
TRI : YAW servo on servo 6 or servo 4 in MEGA2560 boards with HW_PWM's
HELI: 4,6,7 - swashplate servos, 5-rear servo or rear motor (MOTOR2 output can be used too for rear motor)
servo and motor pin assignments
For promini:
Motors : 9,10,11,3,6,5,A2,12
Servos : A0,A1,A2,12,11,3,10,9
For Mega:
Motors: 3,5,6,2,7,8,9,10
Servos SW_PWM : 34+44 , 35+45 , 33+46 , 37,6,2,5,3
Servos HW_PWM : 44,45,46,11,12,6,7,8
So from this it seems than Lwing should be D12 and Rwing D11 correct? The only thing I need now is the correct input from RC list...
Regards
Re: Airplane mode
The wikii describes pre v2.3 and later.
FWing has support for 1 motor.
most likely you will have to activate lpf filter(lowest possible value to start) for gyro and/or gyro.smoothing (start with values of 50) because FW has plenty vibrations.
FWing has support for 1 motor.
most likely you will have to activate lpf filter(lowest possible value to start) for gyro and/or gyro.smoothing (start with values of 50) because FW has plenty vibrations.
Re: Airplane mode
Now I am even more confused.
So for multiwii 2.3
d9 = throttle
d12 = left wing
d11 = right wing
Then last question, is there another way to set servo values and reverse on 2.3? The gui does not include it and ez gui does not work on my phone...
So for multiwii 2.3
d9 = throttle
d12 = left wing
d11 = right wing
Then last question, is there another way to set servo values and reverse on 2.3? The gui does not include it and ez gui does not work on my phone...
Re: Airplane mode
Yes there is something like override.servos.min .max .mid in config.h
I did not know gui has no support for FW servos yet?
I did not know gui has no support for FW servos yet?
Re: Airplane mode
Hi Hamburger
Seems I was wrong. I went to check it again and then saw the small servo button on top... I missed it the previous times. I will check it and report back.
Thanks for the help
Seems I was wrong. I went to check it again and then saw the small servo button on top... I missed it the previous times. I will check it and report back.
Thanks for the help
Re: Airplane mode
I have a Flip 1.5 board from witespyquad. I would like to know how to set it up for airplane mode. I started looking at this thread but I'm confused as to the pinout. I see it mentioned to use the D11 and D12 pins or D6 and D37, But D6 is the rudder input and D12 is the AUX2 input and D37 doesn't exist (typo?) (according to this http://witespyquad.gostorego.com/catalo ... mage/1041/)
The board has an atmega328.
Is there an easy way to redefine what pins are used for the outputs?
The board has an atmega328.
Is there an easy way to redefine what pins are used for the outputs?
Re: Airplane mode
you can find more inf here.
It's not really up to date but contains the info you need.
http://fotoflygarn.blogspot.se/2012/03/ ... -same.html
your board is same as a mini.
Function of D12 is set in config.h
If you want any other function than servo on D12 you must set a define for it.
It's not really up to date but contains the info you need.
http://fotoflygarn.blogspot.se/2012/03/ ... -same.html
your board is same as a mini.
Function of D12 is set in config.h
If you want any other function than servo on D12 you must set a define for it.
Re: Airplane mode
I'm using 2.2 code if that matters.
I'm looking through config.h and I don't see where the servo pins are defined. Can you give me an example so I can find it?
If I search for D12 the only line that comes up is
//#define D12_POWER // Use D12 on PROMINI to power sensors. Will disable servo[4] on D12
I'm looking through config.h and I don't see where the servo pins are defined. Can you give me an example so I can find it?
If I search for D12 the only line that comes up is
//#define D12_POWER // Use D12 on PROMINI to power sensors. Will disable servo[4] on D12
Re: Airplane mode
Hi Ringo,
Here is where AUX2 pin is set.
If you dont define RCAUX12 Wing1 servo will be on D12.
You don't need two wingchannels if you don't plan to use Flapperons.
A Y-Cable can also be used.
Patrik
Here is where AUX2 pin is set.
/********************************* Aux 2 Pin ***********************************/
/* possibility to use PIN8 or PIN12 as the AUX2 RC input (only one, not both)
it deactivates in this case the POWER PIN (pin 12) or the BUZZER PIN (pin 8) */
//#define RCAUXPIN8
//#define RCAUXPIN12
If you dont define RCAUX12 Wing1 servo will be on D12.
You don't need two wingchannels if you don't plan to use Flapperons.
A Y-Cable can also be used.
Patrik
Re: Airplane mode
Guys,
can anyone please give a quick rundown on flashing airplane firmware to a Crius SE board + configuring 2 modes: altitude hold+stabilzation, and return to home?
can anyone please give a quick rundown on flashing airplane firmware to a Crius SE board + configuring 2 modes: altitude hold+stabilzation, and return to home?
Re: Airplane mode
Airplane RTH thread updated.
viewtopic.php?f=7&t=2456&p=44669#p44669
viewtopic.php?f=7&t=2456&p=44669#p44669
Re: Airplane mode
a question:
How do you trim the accelerometers?
In the same manner of a multicopter?
Because the rudder corrects me and always wants to keep the bow although I have not activated the mode in Mag?
How do you trim the accelerometers?
In the same manner of a multicopter?
Because the rudder corrects me and always wants to keep the bow although I have not activated the mode in Mag?
Re: Airplane mode
I calibrate Acc by rigging up the plane in expected Level flight angle in all axis.
Usually a little nose up.
It can be adjusted by AccTrim with sticks in field.
Or recalibrate Acc in other angles.
I have never flown with rudder but test to Zero YAW_I.
Usually a little nose up.
It can be adjusted by AccTrim with sticks in field.
Or recalibrate Acc in other angles.
I have never flown with rudder but test to Zero YAW_I.
-
Michael van der hoek
- Posts: 39
- Joined: Fri Nov 29, 2013 1:33 pm
Re: Airplane mode
hey guys,
im using a naze32 with baseflight firmware in my bixler airplane. The altitude hold by baro is done with motor rpm, so if its going to high the motor rpm will drop and if its going to low the motor rpm will spool up.
Is there any way to dont use the motor for hight control but use the elevator to control hight?
I asked this in 32 bit section, but timecop said i should ask here.
greetsz
im using a naze32 with baseflight firmware in my bixler airplane. The altitude hold by baro is done with motor rpm, so if its going to high the motor rpm will drop and if its going to low the motor rpm will spool up.
Is there any way to dont use the motor for hight control but use the elevator to control hight?
I asked this in 32 bit section, but timecop said i should ask here.
greetsz
Re: Airplane mode
Hi You can find this row in MultiWii.cpp in the 8-bit version.
Comment out to disable the input on throttle.
Replace with
You might have to change between += or -=.
Please report back.
Patrik
Code: Select all
rcCommand[THROTTLE] = initialThrottleHold + BaroPID;Comment out to disable the input on throttle.
Replace with
Code: Select all
rcCommand[PITCH] += BaroPID;You might have to change between += or -=.
Please report back.
Patrik
-
Michael van der hoek
- Posts: 39
- Joined: Fri Nov 29, 2013 1:33 pm
Re: Airplane mode
hmm, than i first have to find out how to change the code, will have a look at it in github.
any suggestions?
any suggestions?
-
Greg Covey
- Posts: 11
- Joined: Tue Feb 05, 2013 11:20 pm
- Location: Rochester, NY USA
- Contact:
Re: Airplane mode
Hi,
I have set up a Multiwii airplane using v2.3 with an older Pro2 MEGA board. My goal is to eventually use GPS for RTH and waypoint features but my first test will only allow throttle through R/C control for safety. I changed the orientation of the board 90 degrees so that it would fit inside the fuselage. As long as <#define MEGA_HW_PWM_SERVOS> is commented out in config.h, it uses the same "D" outputs as a quadcopter. In the v2.3 GUI I could change the control offset direction for YAW. Very nice!
Step1 is to test PASSTHRU and HORIZON modes on my SkyWalker FPV plane without giving throttle control to Multiwii. This tested out nicely on the ground so it is time to test it in the air. HORIZON mode uses both the gyros and ACC to keep the plane level and true in direction.
I see a small deflection on the aileron, elevator, and yaw control surfaces when I change the R/C transmitter from PASSTHRU to HORIZON mode and back. Is there a procedure to eliminate the small offsets seen between these modes?
Thank you.
I have set up a Multiwii airplane using v2.3 with an older Pro2 MEGA board. My goal is to eventually use GPS for RTH and waypoint features but my first test will only allow throttle through R/C control for safety. I changed the orientation of the board 90 degrees so that it would fit inside the fuselage. As long as <#define MEGA_HW_PWM_SERVOS> is commented out in config.h, it uses the same "D" outputs as a quadcopter. In the v2.3 GUI I could change the control offset direction for YAW. Very nice!
Step1 is to test PASSTHRU and HORIZON modes on my SkyWalker FPV plane without giving throttle control to Multiwii. This tested out nicely on the ground so it is time to test it in the air. HORIZON mode uses both the gyros and ACC to keep the plane level and true in direction.
I see a small deflection on the aileron, elevator, and yaw control surfaces when I change the R/C transmitter from PASSTHRU to HORIZON mode and back. Is there a procedure to eliminate the small offsets seen between these modes?
Thank you.
- Attachments
-
-
-