rcsnow wrote:I use turnigy 9x (mode 2) and had to set yaw reverse on my commands and the stick commands work correctly as shown in the manual.
You might want to enable "MOTOR_STOP" via the CLI, so that your motors don't start after arming.
On power up there is only gyro calibration if you don't use gimbal. If you use gimbal, then there is also accel calibration. So no need for level, just still. Or stick calibration afterwards if unsure.
You could go learn C, by reading the baseflight code. Start with main.c. See that calibration settings you were asking about there.
Hmm, I took a look. Wow, there is a lot there. I think I'll stick with my Arduino at the moment. I did find the answer to my question in the CLI, though. Also realized what exactly motor stop is. Thank you.

rocketray wrote:@ jseyfert3
Hi,
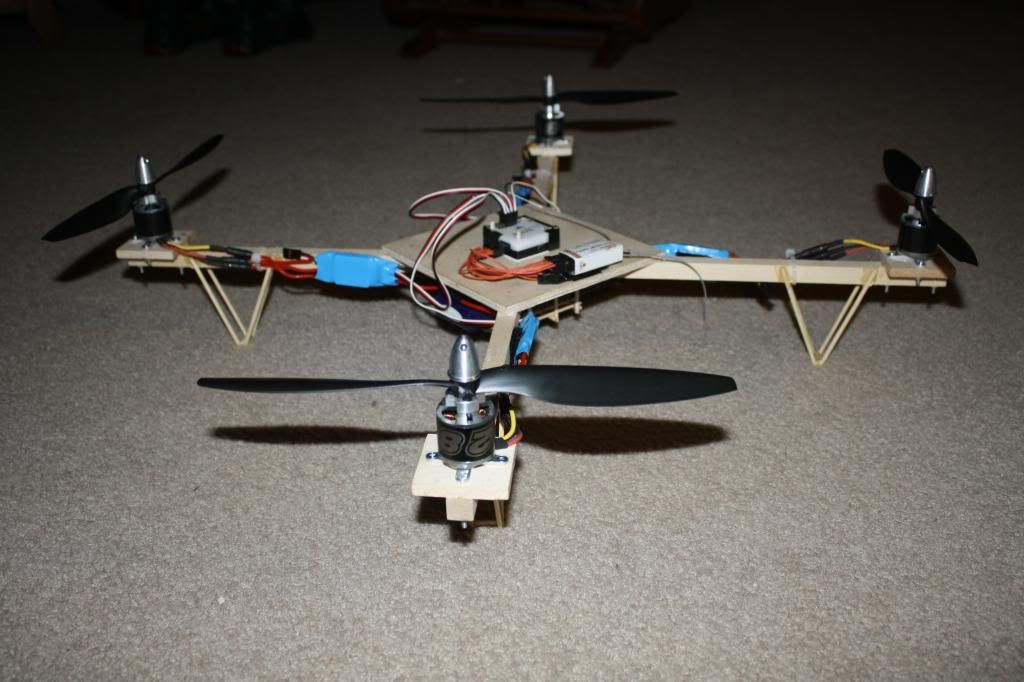
Love the simplicity of the build, well executed and clean, and judging by the video no real problems. I have to reverse several things in my tranny, its a Futaba ZAP9 with a FrSky module fitted so i think that is common and not really a problem if you can sort it via the tranny. Just a few suggestions to make things a little easier.
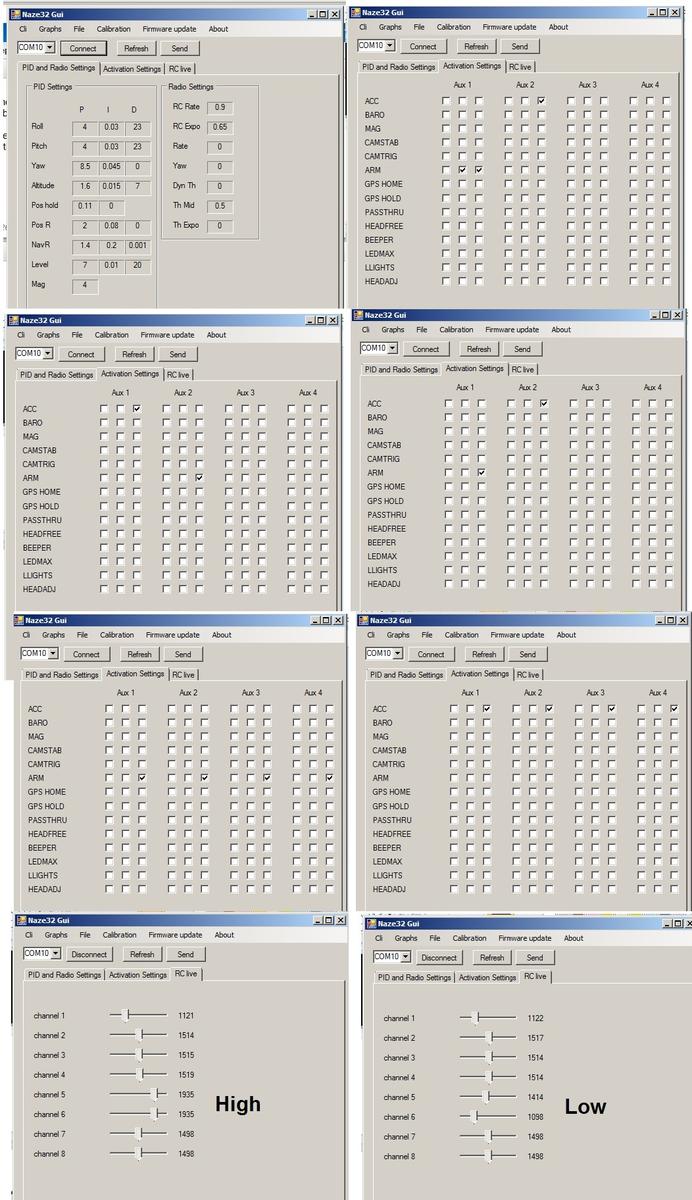
In the Cli
1. feature motor_stop (i personally find it very nerve wracking if this isnt enabled and its a good safety feature)
2. set looptime=350 ( or even 300, it makes it less twitchy )
3. set acc_lpf_factor=100 ( increases stability when in stable mode )
anyway you seem to be doing OK so good luck and all the best
Ray

Thank you. I've added a couple of things, now, after my first crash.

Second time I flew it, got a little cocky and ahead of myself and before I knew it it was going down at a 45° angle. Luckily I only broke an arm cleanly off the main plate, the battery box, and one prop. A little glue and I was back up again. I added "feet" made from half a ping pong ball. This lets the landing gear slide without catching, on a sliding landing. One of my college professor's ideas. I then added a whole ping pong ball front and back, to add orientation.

I then took it out for the third time, and flew for around 10 minutes total, taking it easy. I added dual rates on my TX, dialing it back to 60%, and that helped as well.
I have turned on motor_stop now. What does the looptime do? Also, in regards to the acc, I had a couple other questions.
What is the difference between angle and horizon, before I go trying them? I know one of them must be auto-level. Also, what does camtrig (some sort of camera trigger, like shutter?), passthru, ledmax, llights, and headadj do? The rest of them I've figured out or found out.
So on the flight this morning, I was flying for around 10 minutes, mostly hovering and small movements. I stopped cause I don't yet have a buzzer for VBAT, and was worried about the battery level. Ecalc have me 13.5 minutes of hover time. Well, I charged up the battery, and it only put in about 1700 mAh on a 3300 mAh battery, so I was plenty safe. So then I realized I bought the FrSky telemetry system for a reason, why don't I have at least a voltage sensor? I was about to order one, when I realized the Naze32 came with a telemetry adapter for free. Some quick research and I realize I just need to hook up a couple wires and adjust VBAT in the CLI and I would have battery voltage on my telemetry screen while I fly. But then when I looked where I thought the adapter was, I couldn't find it, and it's so tiny I somewhat doubt I'll ever be able to find it.

Ah well, buzzer should be here in a couple days, and I know someone who is probably going to get an Acro Naze32 in the near future, I'll just add an adapter to his order.
Anyhow, I was pretty excited about flying this morning, and I will continue the long journey of orientation training. Thanks to timecop for making such a versatile board, it works well and can grow with me. I want a small quad I can fly inside when I can't fly outside, so I may have to place another order for an Acro Naze32 here in the near future...