timecop wrote:PPM? And no, not possible.
yes ppm, if that not posible have to find figure out why it doing that, will do a test again with cppm rx, but will lose my led switch
timecop wrote:PPM? And no, not possible.
QuadHag wrote:Since I connected all motors the same way, they are all spinning in the same direction.
Can this be fixed by software, or do I have to change the wired connection?
zarkon wrote:timecop wrote:PPM? And no, not possible.
yes ppm, if that not posible have to find figure out why it doing that, will do a test again with cppm rx, but will lose my led switch
teslahed wrote:I recently updated my Naze32 with the current version of baseflight;
http://code.google.com/p/afrodevices/do ... p&can=2&q=
Code: Select all
feature GPS
set gps_type = 1
set gps_baudrate = 38400
set nav_controls_heading = 0 Plugged the crius V1 into channels 3 and 4 for TX and RX. The manual states pin 3 is TX and 4 RX. As RX plugs to TX and vice versa i have plugged the RX of my GPS into pin 3 and the TX into pin 4. I presume this is right? I've tried it the other way around just in case and that didn't seem to help...
ABL wrote:teslahed wrote:I recently updated my Naze32 with the current version of baseflight;
http://code.google.com/p/afrodevices/do ... p&can=2&q=
Do NOT use such old firmware files.
Use latest baseflight:
http://afrodevices.googlecode.com/svn/trunk/baseflight/obj/baseflight.hex
teslahed wrote:It might be worth updating the manual and / or first post of this thread with this info. I thought i was playing it safe by installing the 'baseflight latest stable version' but it seems anyone with one of the latest boards needs to install a newer version than that or else the barometer doesn't work.
Code: Select all
Hardware is shipped with the most current firmware at the time of assembly. It is
recommended to upgrade to latest stable or development firmware for new features.
<...>
3. Latest baseflight firmware (development)
http://code.google.com/p/afrodevices/source/browse/trunk/baseflight/obj/baseflight.hex
teslahed wrote:I feel a bit silly - but i am now going to have to answer my own question. I gave it 'one more go' after i thought i'd given up (and posted the above) and now it works!
You probably still need 'feature gps'.
zarkon wrote:now having flip of problem,
cGiesen wrote:zarkon wrote:now having flip of problem,
Check the wiring of the motors!
The order is different from MWii I think.
When my Copter flip, my motors are wrong ordered!
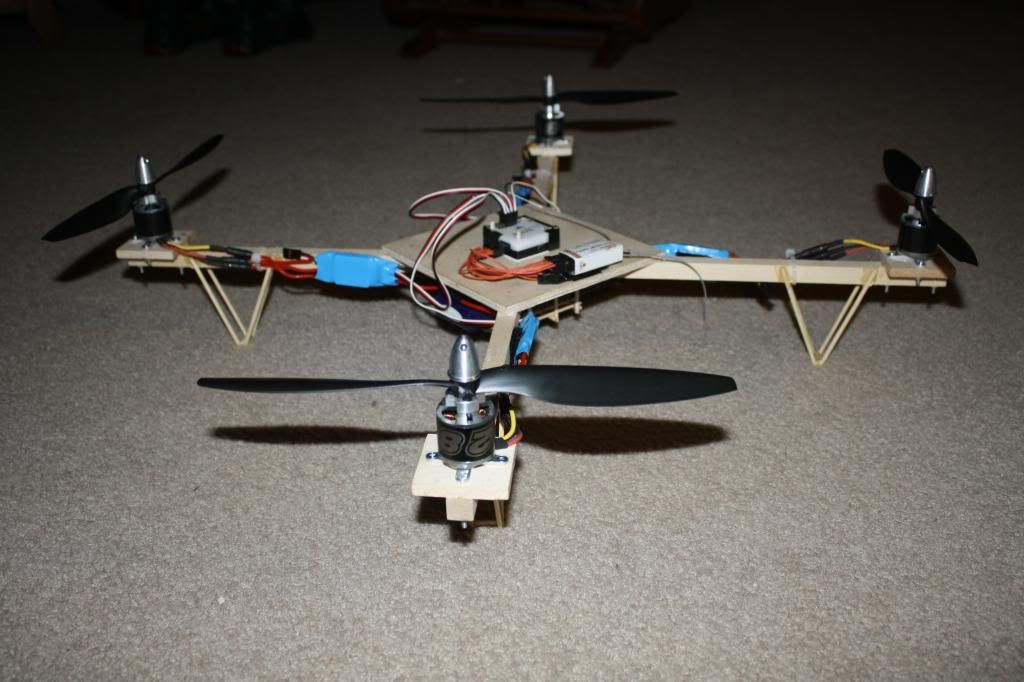
jef79m wrote:zarkon, can you post a pic of your setup?
timecop wrote:This is not something that would be broken by a firmware revision.
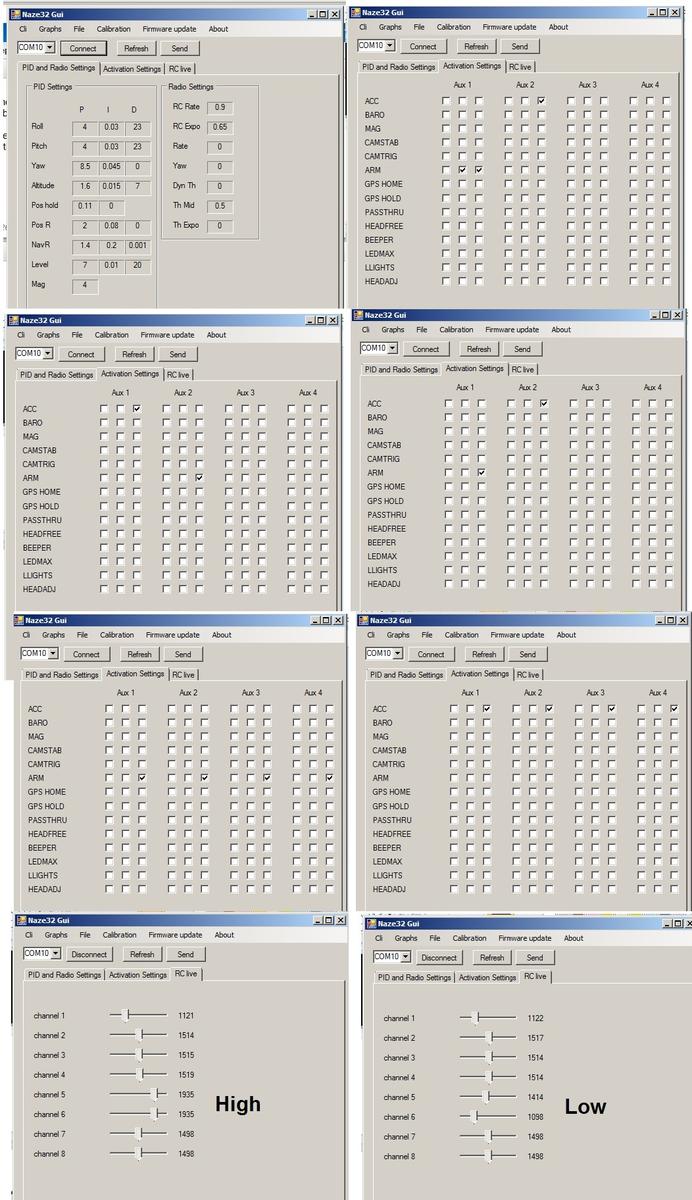
timecop wrote:Does everything properly respond on the graphs?
Pitch forward and the gyro pitch numbers should go positive (up on the graph).
Pitch back and the gyro pitch numbers should go negative (down on the graph)
Roll right and the gyro roll numbers should go positive (up on the graph)
Roll left and the gyro roll numbers should go negative (down on the graph)
Yaw right and the yaw gyro numbers should go positive (up on the graph)
Yaw left and the yaw gyro numbers should go negative (down on the graph)
same for acc ^
do not attempt to fly with acc/horizon/etc on. hover in angle/rate mode first.
if youre shaking the stuff while plugging in battery, do gyro init stick sequence.
also note board "front" direction etc.
timecop wrote:Does everything properly respond on the graphs?
Pitch forward and the gyro pitch numbers should go positive (up on the graph).
Pitch back and the gyro pitch numbers should go negative (down on the graph)
Roll right and the gyro roll numbers should go positive (up on the graph)
Roll left and the gyro roll numbers should go negative (down on the graph)
Yaw right and the yaw gyro numbers should go positive (up on the graph)
Yaw left and the yaw gyro numbers should go negative (down on the graph)
same for acc ^
do not attempt to fly with acc/horizon/etc on. hover in angle/rate mode first.
if youre shaking the stuff while plugging in battery, do gyro init stick sequence.
also note board "front" direction etc.
timecop wrote:Sounds like you're on a DJI frame.
ReadError wrote:Are there even supports for those arms? Take a side pic please.

timecop wrote:dunno , setup looks legit. are you taking off in gyro-only? and all settings are at defaults (reset to defaults from console)?
garbungel wrote:How can I change my servo travel to something else than default through the CLI. Is there something like minrc or maxrc command?
teslahed wrote:Zarkon - are those rctimer motors / props and prop adapters? If so I found the motors work ok but the collet type prop adapters they come with are quite low quality and tend to produce excessive vibrations.
Also the rctimer plastic props are about the worse of the cheap props I've tried and wont be helping you. Have you balanced the props at all?
jseyfert3 wrote:Hopefully these aren't too much of noobish questions. First time I've posted about the controller, anyway. First off, it's my first quad, and I just got done building it (scratchbuilt). I flew it for the first time yesterday afternoon. Here it is, not the first flight, but the first battery still. Before this, I've flown a few airplanes and a Blade CX2, but not for 3 years or so.
http://www.youtube.com/watch?v=tT4GtunipvA
I was surprised how stable it was from the go (piloting skills excluded). I didn't trim anything or touch the PID loop, it was using default settings. So, here we go:
- I double checked proper rotation, yet my roll and yaw both operated backwards. Not an issue, as I did careful first "hops" and servo reversing on the TX fixed that right away, but I was curious why they were operating backward in the first place with default settings.
- My transmitter is set to just under 1000 on the throttle, I believe, when all the way down. When armed, I noted that the motor outputs jump from 1000 to 1150, so I set the BLHeli firmware on the ESC lower throttle limit to 1152. This is the proper way to do it, right? Also, when level, the motor outputs were around 1830 when the throttle input was almost 1900. Tilting/moving the board could raise those higher, I saw 1860 or 1870, and by the bar graphs (I'm using MWC for this), it looks like they could go higher then the throttle setting, perhaps? What is the max output of the Naze32 to the ESC, i.e. what should I set the upper throttle range on the ESC too? I currently have it set at 1900.
- Related to arming, are the stick illustrations in the manual for mode 1? I use mode 2, and I tried the stick combos for arm and disarm and they didn't work. So in the mean time I assigned the arming to AUX1, but as I currently only have a six channel radio, on which channels 5 and 6 are two, not three position switches, that limits extra functions like auto-level, carefree, etc, to one possible choice per flight. I have my eye on the upcoming 9 channel radio from FrSky coming out later this spring, so later it won't be a problem, but right now it uses 50% of my switch real estate just to arm.

- During the initial power-up gyro calibration, does it have to be level? The manual just says don't move, and I didn't know if it had to be level for an accel calibration at the same time.
- There are a number of you guys testing GPS, and I am interested in future use of GPS for position hold and hopefully RTH for later FPV use (signal loss). I'm not asking for a how too, but where do I look to start learning how to use it? I know the very basics of C through doing a couple Arduino projects, but that's practically nothing. I just want to start learning what I need to learn.
ReadError wrote:https://www.youtube.com/watch?feature=player_embedded&v=XaBWDn4AuU8
(Proper link)