Hi, Timecop
I ordered a acro Naze32 without the baro and the mag and was wondering if it's possible to add a mag later if needed using the I2C pins on the bottom of the board.
Thank you.
Naze32 hardware discussion thread
Re: Naze32 hardware discussion thread
yeah.
as long as you keep its orientation same etc.
Cheap breakout stuff available @ ebay if you wanna wait a month: http://www.ebay.com/itm/180877391331
as long as you keep its orientation same etc.
Cheap breakout stuff available @ ebay if you wanna wait a month: http://www.ebay.com/itm/180877391331
Re: Naze32 hardware discussion thread
Sounds good.Thank you, Timecop
Re: Naze32 hardware discussion thread
Just a quick update because this is the thread that helped me getting this thing flying. Went out in the field for my first FPV-testing and some very simple acro.
It's close, but I'm not there yet. No jello, very stable, but some wobble when I'm pushing it. Both in rate and stable mode. I guess it's the base P-values that is too high? In the video the wobble is quite visible after the roll at about 3:00. The utter strangeness happening right after 3:40 is probably a problem with the tail servo. One screw was missing and one servo rod was loose when I landed. I'm very happy that the Talon frame has TWO servo rods for the tail servo. And the lesson learned is that you have to be very careful to remember loctite on ALL screws. I forgot one. And that one is to be found out there in the field:
http://vimeo.com/49900512
First clip LOS, on board footage is FPV.
Some images here:
http://www.flickr.com/photos/eirikso/se ... 587363897/
Spec:
Turnigy Talon Tricopter V1
Tiger 2216-11 900 KV motors
HK F30A SimonK ESC
FreeFlight 1.2 running Baseflight (MultiWii)
Graupner 10x5 props (yes, expensive and finger cutting beasts, but gives me best performance for AP and any jello-trouble)
GoPro Hero 2 1280x720 50p
Turnigy Nano 4S 2200 mAh giving 7 minutes with full FPV equipment and GoPro in waterproof case.
And again: thank you som much timecop! For making my FreeFlight FC useful by porting MultiWii to 32 bit and by helping out when setting it up.
It's close, but I'm not there yet. No jello, very stable, but some wobble when I'm pushing it. Both in rate and stable mode. I guess it's the base P-values that is too high? In the video the wobble is quite visible after the roll at about 3:00. The utter strangeness happening right after 3:40 is probably a problem with the tail servo. One screw was missing and one servo rod was loose when I landed. I'm very happy that the Talon frame has TWO servo rods for the tail servo. And the lesson learned is that you have to be very careful to remember loctite on ALL screws. I forgot one. And that one is to be found out there in the field:
http://vimeo.com/49900512
First clip LOS, on board footage is FPV.
Some images here:
http://www.flickr.com/photos/eirikso/se ... 587363897/
Spec:
Turnigy Talon Tricopter V1
Tiger 2216-11 900 KV motors
HK F30A SimonK ESC
FreeFlight 1.2 running Baseflight (MultiWii)
Graupner 10x5 props (yes, expensive and finger cutting beasts, but gives me best performance for AP and any jello-trouble)
GoPro Hero 2 1280x720 50p
Turnigy Nano 4S 2200 mAh giving 7 minutes with full FPV equipment and GoPro in waterproof case.
And again: thank you som much timecop! For making my FreeFlight FC useful by porting MultiWii to 32 bit and by helping out when setting it up.
Re: Naze32 hardware discussion thread
http://www.rcgroups.com/forums/showpost.php?p=22626826&postcount=72
Just for everyone's benefit: above small quad (total weight incl. 3S 2.2Ah battery about 550g). Flies well and I am impressed with the Naze32. Level mode works not (build from Sep 21st), acro mode is fantastic. Battery lasts 12min slow flying.
Because of it's unusual small size and tr-blade props, here the PID values I use which work well:
pitch/roll: 7/0.06/23
looptime=3000
The default values were quite off, although it was flyable. BARO mode works reasonably well (boring though). I have not tried anything with the mag as I turned it on once and it confused the heck out of me when I tried. Won't repeat that anytime soon until I understand it more.
Just for everyone's benefit: above small quad (total weight incl. 3S 2.2Ah battery about 550g). Flies well and I am impressed with the Naze32. Level mode works not (build from Sep 21st), acro mode is fantastic. Battery lasts 12min slow flying.
Because of it's unusual small size and tr-blade props, here the PID values I use which work well:
pitch/roll: 7/0.06/23
looptime=3000
The default values were quite off, although it was flyable. BARO mode works reasonably well (boring though). I have not tried anything with the mag as I turned it on once and it confused the heck out of me when I tried. Won't repeat that anytime soon until I understand it more.
Last edited by hkubota on Sat Sep 22, 2012 12:35 pm, edited 1 time in total.
Re: Naze32 hardware discussion thread
davidwp56 wrote:timecop wrote:davidwp56 wrote:(posted @ rcg)
If anyone else can help me out with this it would be appreciated, just need to know how the Frsky D4R-ll receiver can be hooked up to the board with telemetry adapter.
There's pinout on the bottom of D4FR-II. RX/TX/GND/A2 or something similar.
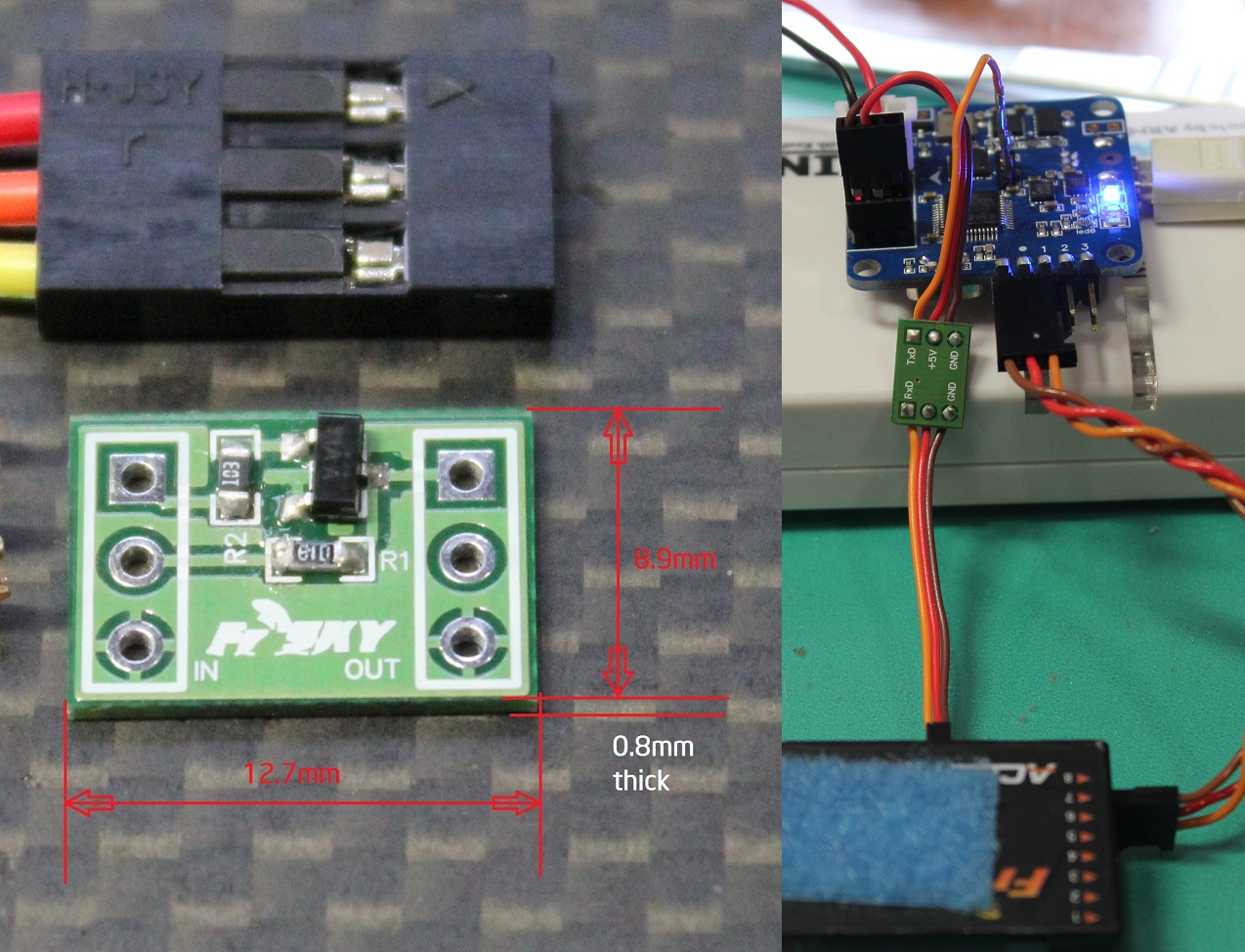
Wire up the frsky adapter as shown in the pic here : http://abusemark.com/store/images/frskyadp.jpg
Then take 'RxD' and GND parts from the frsky end of adapter and connect to RX + GND wires on the D4FR-II.
You can snip off TX and A2 lines as they won't be used.
Thanks TC,
Will see how I go, am liking this Frsky stuff..
David
TC,
Have set up Frsky on my radio system and using D4R-11 as above have wired up for telemetry as you have outlined, triple checked for connections etc, but get nothing at all (other than signal strength) any suggestions, from what I understand I didn't think I needed to change any settings.
Thanks
David.
Re: Naze32 hardware discussion thread
you need feature telemetry on as well
Re: Naze32 hardware discussion thread
timecop wrote:you need feature telemetry on as well
Thanks TC,
Knew it would be something dumb.
David.
Re: Naze32 hardware discussion thread
Is there a possibility to reconize that GPS fix have enough satellit to handel with Naze32 ? I have no buzzer on Naze32 and no laptop or iphone on the field. 
Re: Naze32 hardware discussion thread
I think the red led starts to blink > 5 or 6 sats. Same as on MWC.
Re: Naze32 hardware discussion thread
Ok this is like you write, led blinks by 5 sats, thanks !
Re: Naze32 hardware discussion thread
Witch are the right value for plug rctimer crius cn-06 GPS:
Naze32 green board rev1
Rx from GPS on Tx from Naze32
Tx from GPS on Rx from Naze32
Vcc from GPS connect to 5V from Naze32 ??? or should it be 3,3V
gps_type = 1
gps_baudrate = 115200 or 57600
I ask because by testing the Gps value sundently be frozen and send ever the same value, is the GPS overheating by 5V Vcc or is there another trouble ?
Naze32 green board rev1
Rx from GPS on Tx from Naze32
Tx from GPS on Rx from Naze32
Vcc from GPS connect to 5V from Naze32 ??? or should it be 3,3V
gps_type = 1
gps_baudrate = 115200 or 57600
I ask because by testing the Gps value sundently be frozen and send ever the same value, is the GPS overheating by 5V Vcc or is there another trouble ?
Re: Naze32 hardware discussion thread
+5Vhinkel wrote:Vcc from GPS connect to 5V from Naze32 ??? or should it be 3,3V
?
manual;
When GPS feature is enabled, channels 3 and 4 are are used for 3.3V GPS connection.
(3:TX, 4:RX). with CPPM receiver, these are normally unused, with standard receiver,
connect AIL to 1, ELE to 2, THR to 5, RUD to 6, and AUX1/2 to channels 7 and 8.
Re: Naze32 hardware discussion thread
Danke JUERGEN , I connect GPS like LeoWie schematic and made tests in this configuration 5V by Vcc on cn-06 crius,
and 115200 baudrate but after some minutes the values from cn-06 are Frozen no change; like ever 10 sat when GPS is Covered; and i would like to know if GPS is heating and than send ever the same data then this situation is not good for doing the first GPS flytest
PS: ( 3:RX , 4:TX )
and 115200 baudrate but after some minutes the values from cn-06 are Frozen no change; like ever 10 sat when GPS is Covered; and i would like to know if GPS is heating and than send ever the same data then this situation is not good for doing the first GPS flytest
PS: ( 3:RX , 4:TX )

Re: Naze32 hardware discussion thread
Hi all,
I am sure this is just something i am overseeing but i have a small problem regarding my engines.
I finally received my X9 with FRSky Tx and Rx and i am using PPM.
My Naze32 (green one) is using the lastes stable BaseFlight (july 25th)
When i connect the flight controller to the MultiWii software it's giving me the data and i see the stick movement.
When al is checked i;ll arm the controller (green light, Arm in Gui lit) Then i'll thottle up and i see that the engines should receive signals to start spinning.
My ESC's (Simon K flashes) and Engines have just been callibrated with the receiver (not ppm) and work like a charm.
The FC is powerd by one Bec from one of the ESC's and also lights up (USB not yet connected)
I am not using servo mode (feature disabled) just standard
Set are al default
Features motor_stop and ppm enabled
Motor signal cables are connected on engine port 1,2,3,4
What am i forgetting or doing wrong.
Regards
Thijs
I am sure this is just something i am overseeing but i have a small problem regarding my engines.
I finally received my X9 with FRSky Tx and Rx and i am using PPM.
My Naze32 (green one) is using the lastes stable BaseFlight (july 25th)
When i connect the flight controller to the MultiWii software it's giving me the data and i see the stick movement.
When al is checked i;ll arm the controller (green light, Arm in Gui lit) Then i'll thottle up and i see that the engines should receive signals to start spinning.
My ESC's (Simon K flashes) and Engines have just been callibrated with the receiver (not ppm) and work like a charm.
The FC is powerd by one Bec from one of the ESC's and also lights up (USB not yet connected)
I am not using servo mode (feature disabled) just standard
Set are al default
Features motor_stop and ppm enabled
Motor signal cables are connected on engine port 1,2,3,4
What am i forgetting or doing wrong.
Regards
Thijs
Re: Naze32 hardware discussion thread
Seems to be something wrong with the flight controller.
I have second one (Naze32 withoud baro and magno) with the same firmware connected the same way and this one is working like it shoot.
Someone an idea?
both flight controllers have never been used until today
thx
Thijs
I have second one (Naze32 withoud baro and magno) with the same firmware connected the same way and this one is working like it shoot.
Someone an idea?
both flight controllers have never been used until today
thx
Thijs
Re: Naze32 hardware discussion thread
Found the problem 
Faulty wirering
Sorry TC for ever doubting your amazing board.
Faulty wirering
Sorry TC for ever doubting your amazing board.

{kind=link}
Re: Naze32 hardware discussion thread
ad u-blox GPS:
In the meantime I have set gps baud back to 57.6k (after some connection problems + after I have seen how fast u-blox test software sends sentences via 9.6k ... so I think 57k is fast enough to catch this some Hz only infos).
Additional info (not verified):
- After changing gps related values via CLI (flight field / laptop) I had the impression, that CLI's save/exits board reboot was not enough(?) ... but after a power off/on boot (disconnecting both lipo + usb) GPS was green again. Yesterday after updating to r223 I had the same effect I think (desktop PC). Summary: GPS has to be rebooted/powered off/on to get any changes(?).
- ... and / or I think there also is a relation between laptops accu volts: once at about <25% laptop accu filled I had some usb comm problems ... where first info gets lost always seems to be GPS.
In the meantime I have set gps baud back to 57.6k (after some connection problems + after I have seen how fast u-blox test software sends sentences via 9.6k ... so I think 57k is fast enough to catch this some Hz only infos).
Additional info (not verified):
- After changing gps related values via CLI (flight field / laptop) I had the impression, that CLI's save/exits board reboot was not enough(?) ... but after a power off/on boot (disconnecting both lipo + usb) GPS was green again. Yesterday after updating to r223 I had the same effect I think (desktop PC). Summary: GPS has to be rebooted/powered off/on to get any changes(?).
- ... and / or I think there also is a relation between laptops accu volts: once at about <25% laptop accu filled I had some usb comm problems ... where first info gets lost always seems to be GPS.
Re: Naze32 hardware discussion thread
38400 is max needed for 10hz nmea with rmc and gga.
Re: Naze32 hardware discussion thread
Okay, simple newbie question, but I have to ask it. I've configured the quad, mounted it, and calibrated/trimmed it.
When I go to maiden the quad, what is it that I'm expecting to happen? If I give enough throttle to hover, should the quad just gain altitude and stay at it's present position (assuming 0mph wind)
When I go to maiden the quad, what is it that I'm expecting to happen? If I give enough throttle to hover, should the quad just gain altitude and stay at it's present position (assuming 0mph wind)
Re: Naze32 hardware discussion thread
sure. and in gyro-only (default) mode, it would also stay in whatever angle you give it with sticks until you correct it with equal opposite stick control. but yeah, lift off with throttle only should more or less stay level (if it was taking off from level).
if you moved the frame while powering it up, do gyro calibration stick sequence before arming.
if you moved the frame while powering it up, do gyro calibration stick sequence before arming.
Re: Naze32 hardware discussion thread
1st of all: have(had) a look at http://www.abusemark.com/downloads/naze32_rev2.pdf 's page 11(?).
As a total newbie (in gyro only mode) it's not very easy: the angle of the copter will be indifferent: eg 10 degrees = 10 degrees till you control it back to 0 on your TX. If this your 1st command (maybe with heart rate 195+ stress? ) is -55 degrees and not -10 you are a little in trouble.
) is -55 degrees and not -10 you are a little in trouble. 
So - if you are totally new to copters - it is highly recommended to select eg. a soft meadow with high grass and try to hover at about 1m height with copter heading away from you ... and in case of trouble simply throttle down to 0 and let the copter fall into the high grass.
Later - with ACC - it will be easy: ACC brings the copter 0 degrees angle automatically.
... and please crash protect your Naze32!
Good luck!
~~~
Exercise 2: later - if step 1 is passed and there still is a little grass on this meadow - switch on ACC and and try the same w copter heading to you ...
- switch on ACC and and try the same w copter heading to you ...
As a total newbie (in gyro only mode) it's not very easy: the angle of the copter will be indifferent: eg 10 degrees = 10 degrees till you control it back to 0 on your TX. If this your 1st command (maybe with heart rate 195+ stress?
So - if you are totally new to copters - it is highly recommended to select eg. a soft meadow with high grass and try to hover at about 1m height with copter heading away from you ... and in case of trouble simply throttle down to 0 and let the copter fall into the high grass.
Later - with ACC - it will be easy: ACC brings the copter 0 degrees angle automatically.
... and please crash protect your Naze32!
Good luck!
~~~
Exercise 2: later - if step 1 is passed and there still is a little grass on this meadow
Bhuwan wrote:Okay, simple newbie question, but I have to ask it. I've configured the quad, mounted it, and calibrated/trimmed it.
When I go to maiden the quad, what is it that I'm expecting to happen? If I give enough throttle to hover, should the quad just gain altitude and stay at it's present position (assuming 0mph wind)
Re: Naze32 hardware discussion thread
Thanks @LeoWie and @timecop - I'll use this information for (hopefulyl) a stable flight.
Re: Naze32 hardware discussion thread
Which is the right number for mag declination BERLIN 2deg 53min east = +253 is this ok ?
and is this Value important in the software ?
(mag_declination = 0; // For example, -6deg 37min, = -637 Japan, format is [sign]dddmm (degreesminutes) default is zero)
and is this Value important in the software ?
(mag_declination = 0; // For example, -6deg 37min, = -637 Japan, format is [sign]dddmm (degreesminutes) default is zero)
Re: Naze32 hardware discussion thread
From the code, your format is correct (but you don't need the plus sign, only needed for negative). dddmm, and mm must be two digits. Also, the magnetic declination is used in the heading calculation when MAG is present. If the value is 0, it will use the raw data from the compass and it won't fly off in an accurate heading (e.g magnetic North instead of true North).
imu.c
if (sensors(SENSOR_MAG)) { // Attitude of the cross product vector GxM
heading = _atan2f(EstG.V.X * EstM.V.Z - EstG.V.Z * EstM.V.X, EstG.V.Z * EstM.V.Y - EstG.V.Y * EstM.V.Z);
heading = heading + magneticDeclination;
heading = heading / 10;
if (heading > 180)
heading = heading - 360;
else if (heading < -180)
heading = heading + 360; }
imu.c
if (sensors(SENSOR_MAG)) { // Attitude of the cross product vector GxM
heading = _atan2f(EstG.V.X * EstM.V.Z - EstG.V.Z * EstM.V.X, EstG.V.Z * EstM.V.Y - EstG.V.Y * EstM.V.Z);
heading = heading + magneticDeclination;
heading = heading / 10;
if (heading > 180)
heading = heading - 360;
else if (heading < -180)
heading = heading + 360; }
Re: Naze32 hardware discussion thread
Thanks rotary65 for your fast answer
Re: Naze32 hardware discussion thread
While looking into the magnetic declination question, I came across this nice (PDF) introduction into MWC GPS by EOSBandi. Although it's not really Naze32, it explains the GPS related MWC parameters and I thought I'd pass the link along to those of you experimenting with GPS. He includes a link to a neat GPS PID simulator(for Arducopter, but still useful) on the DYIDrones site.
Re: Naze32 hardware discussion thread
Many thanks to rotary65 for prev. post. It's two missing links for me + very useful.
PS: Yesterday I had some glasses of wine in a retaurant in Vienna's Arts-/MuseumsQuartier with a new friend from this forum and we both had a copter with us: my Micro Naze32 + another <1 kg Naze32 quad. Within 6 hours there our copters attracted 5(!) different young ladies who wanted to have detailed infos about the copters (not our telefon numbers) and I had to indoor fly 3 times with 4 or more glasses if wine ... (no crash). Sumary: I think there are some hidden shoe-, handbag- or jewel micro components inside the Naze32 and from now on in restaurants I always will sit on a table next to the ladies toilet!
PS: Yesterday I had some glasses of wine in a retaurant in Vienna's Arts-/MuseumsQuartier with a new friend from this forum and we both had a copter with us: my Micro Naze32 + another <1 kg Naze32 quad. Within 6 hours there our copters attracted 5(!) different young ladies who wanted to have detailed infos about the copters (not our telefon numbers) and I had to indoor fly 3 times with 4 or more glasses if wine ... (no crash). Sumary: I think there are some hidden shoe-, handbag- or jewel micro components inside the Naze32 and from now on in restaurants I always will sit on a table next to the ladies toilet!
Last edited by LeoWie on Fri Sep 28, 2012 4:37 am, edited 1 time in total.
Re: Naze32 hardware discussion thread
.
FunFly Controller "Acro Naze 32" no more in stock
 http://abusemark.com/store/index.php?ma ... ucts_id=38
http://abusemark.com/store/index.php?ma ... ucts_id=38

FunFly Controller "Acro Naze 32" no more in stock
Re: Naze32 hardware discussion thread
Just looked at it and it looks like there are right now 
•6 Units in Stock
•6 Units in Stock
Re: Naze32 hardware discussion thread
Yeah, someone got a few while I was sleeping. Fixed now.
Re: Naze32 hardware discussion thread
Sleeping ?? you??
Thought you were alway's online
Kidding
Thought you were alway's online
Kidding
Re: Naze32 hardware discussion thread
Hi, a944734
I am trying to get my Navigatron to work with the Naze32 (Sorry Timecop, I got one of the I2C "hacks" before I got my Naze). It is the same MTK GPS module from flytron with the addition of Atmega for the I2C functions. It works with my Pro Mini based FC, which I'm trying to replace with the Naze. The GPS is flashed with MTK binary 5Hz firmware from the EosBandi's google site. Unfortunately I can't get it to show in the GUI connected to the Naze32. I have only the Tx from the GPS connected to the Rx on the Naze (port 4) (and power and ground of course) and GPS set to mode 2 and gps serial spped to 115200. Did you make any progress with your module and what am I missing?
Thank you.
I am trying to get my Navigatron to work with the Naze32 (Sorry Timecop, I got one of the I2C "hacks" before I got my Naze). It is the same MTK GPS module from flytron with the addition of Atmega for the I2C functions. It works with my Pro Mini based FC, which I'm trying to replace with the Naze. The GPS is flashed with MTK binary 5Hz firmware from the EosBandi's google site. Unfortunately I can't get it to show in the GUI connected to the Naze32. I have only the Tx from the GPS connected to the Rx on the Naze (port 4) (and power and ground of course) and GPS set to mode 2 and gps serial spped to 115200. Did you make any progress with your module and what am I missing?
Thank you.
a944734 wrote:MTK testers (anyone ?) be cautious - possibly another case of control loss in PH
http://www.rcgroups.com/forums/showpost ... tcount=425
Re: Naze32 hardware discussion thread
"I only have the tx from GPS connected"
if youre using mtk type, you need both rx and tx so it can send appropriate init stuff.
a friendly reminder: unless you're willing to debug stuff or look through code to see what's going on, don't bother with GPS. i do NOT test it.
if youre using mtk type, you need both rx and tx so it can send appropriate init stuff.
a friendly reminder: unless you're willing to debug stuff or look through code to see what's going on, don't bother with GPS. i do NOT test it.
Re: Naze32 hardware discussion thread
timecop wrote:"I only have the tx from GPS connected"
if youre using mtk type, you need both rx and tx so it can send appropriate init stuff.
a friendly reminder: unless you're willing to debug stuff or look through code to see what's going on, don't bother with GPS. i do NOT test it.
i started to add the code for baseflight plus :-/
it is to early to say anything - but there is a need for good logs.
i am scared to generate a fly-away-copter.
therefore i need to know what the gps unit is 'seeing'.
so we need to define a common log format.
this is just to share the experience...
Re: Naze32 hardware discussion thread
Like TC said, you need to connect TX and RX so the init strings are sent to the MTK. Once you have this done, you plug power to the whole system. After everything is started, you have to REBOOT the Naze while everything is still powered on. Only way I know is to go through CLI, connect either via USB or via Bluetooth Android app. Get the prompt with #, then save or exit. Only after this the GPS will show as active in the GUI - you may now also wait for GPS fix. However I would not recommend to try PosHold in flight, it will lock up the Naze after some seconds, some motors go full speed and there is no more control. Some bug finding is extremely needed there ...
Re: Naze32 hardware discussion thread
Hi All,
A completely diferent question, (not GPS)
I am using Frksy with cppm and al seems to work good (after reading about the problemes with the cppm timing of Frsky and more than 6ch http://diydrones.com/profiles/blogs/why-frsky-cppm-signal-is-so-disappointing)
Anyway i was wondering if it where possible to split up the cppm signal to multiple devices.
for instance.
If i have a Camera on my quad (not having it yet) and want to switch it on or take a photo in mid air.
How to do this with all 8ch in use using cppm to my Naze32.
Is the Naze32 able to relay the signal of 1 or more channels or switch external devices via a motor output or so?
thx
Thijs
A completely diferent question, (not GPS)
I am using Frksy with cppm and al seems to work good (after reading about the problemes with the cppm timing of Frsky and more than 6ch http://diydrones.com/profiles/blogs/why-frsky-cppm-signal-is-so-disappointing)
Anyway i was wondering if it where possible to split up the cppm signal to multiple devices.
for instance.
If i have a Camera on my quad (not having it yet) and want to switch it on or take a photo in mid air.
How to do this with all 8ch in use using cppm to my Naze32.
Is the Naze32 able to relay the signal of 1 or more channels or switch external devices via a motor output or so?
thx
Thijs
Re: Naze32 hardware discussion thread
yes, you can mirror aux1..4 to the RC pins 5..8 by setting gimbal_flags=8 in cli, however if you're using a fullsize receiver like D8R or similar, you can just connect regular servo connectors to channels 5,6,7 (while keeping PPM on channel 8) and it works as expected.
Re: Naze32 hardware discussion thread
timecop wrote:yes, you can mirror aux1..4 to the RC pins 5..8 by setting gimbal_flags=8 in cli, however if you're using a fullsize receiver like D8R or similar, you can just connect regular servo connectors to channels 5,6,7 (while keeping PPM on channel 8) and it works as expected.
I'm doing so also. Cppm and pwm values are there at the same time
gps and codesourcery
there is a clash on the defines:
#define _X 1
#define _Y 0
the first declarartion is already in 'use'.
this has sideeffectd.
#define _gpsX 1
#define _gpsY 0
would be correcter
#define _X 1
#define _Y 0
the first declarartion is already in 'use'.
this has sideeffectd.
#define _gpsX 1
#define _gpsY 0
would be correcter
Re: Naze32 hardware discussion thread
I agree, changed for next commit.
Re: Naze32 hardware discussion thread
hmm - to early in the morning - bad typing ...
should stop coding ...
should stop coding ...
Re: Naze32 hardware discussion thread
I'm unable to upload the baseflight.hex from SVN onto my white pcb version.
I'm only able to upload the older baseflight from the downloads list.
I get this message when I try to upload: (pls see attachment)
I'm only able to upload the older baseflight from the downloads list.
I get this message when I try to upload: (pls see attachment)
- Attachments
-
- This error is displayed when I try to upload baseflight.hex from SVN. I also trid the other baseflight_fy90q.hex, but still the same error!?!?
Re: Naze32 hardware discussion thread
Why don't you try to use the naze32 windows configurator? It updates the latest firmware on svn (you download and update).
Re: Naze32 hardware discussion thread
nicog wrote:timecop wrote:yes, you can mirror aux1..4 to the RC pins 5..8 by setting gimbal_flags=8 in cli, however if you're using a fullsize receiver like D8R or similar, you can just connect regular servo connectors to channels 5,6,7 (while keeping PPM on channel 8) and it works as expected.
I'm doing so also. Cppm and pwm values are there at the same time
That's great news
thx for the info
Last edited by tcarnal on Thu Oct 04, 2012 2:35 pm, edited 1 time in total.
Re: Naze32 hardware discussion thread
vineetp wrote:I'm unable to upload the baseflight.hex from SVN onto my white pcb version.
I'm only able to upload the older baseflight from the downloads list.
I get this message when I try to upload: (pls see attachment)
you probably saved the html page instead of the actual hex from SVN.
have you tried reading the first post where it tells how to obtain latest hex from SVN?
But yeah, just use the GUI that does it for you...
You've had the hardware for like a month already, surely its not that hard.
Re: Naze32 hardware discussion thread
nicog wrote:Why don't you try to use the naze32 windows configurator? It updates the latest firmware on svn (you download and update).
+1
(pic attached)
- Attachments
-
- Naze32GUIfwupd.jpg
- (60.09 KiB) Not downloaded yet
Re: Naze32 hardware discussion thread
timecop wrote:you probably saved the html page instead of the actual hex from SVN.
Lol, no. In the list i right-clicked on baseflight.hex and then clicked 'save link as'.
timecop wrote:You've had the hardware for like a month already, surely its not that hard.
No, it wasn't hard at all. I flaahed it on day 1 itself (with the wrong, older firmware), then went on a break.
Thanks for the help all of you.
Re: Naze32 hardware discussion thread
nicog wrote:Why don't you try to use the naze32 windows configurator?
where is the naze32 windows configurator, to find it?