I've played with this idea some time ago and did some testing. It's possible and it's not too hard, but the following code fragments are just for testing propose and not cleany coded nor complete. You have been warned

.
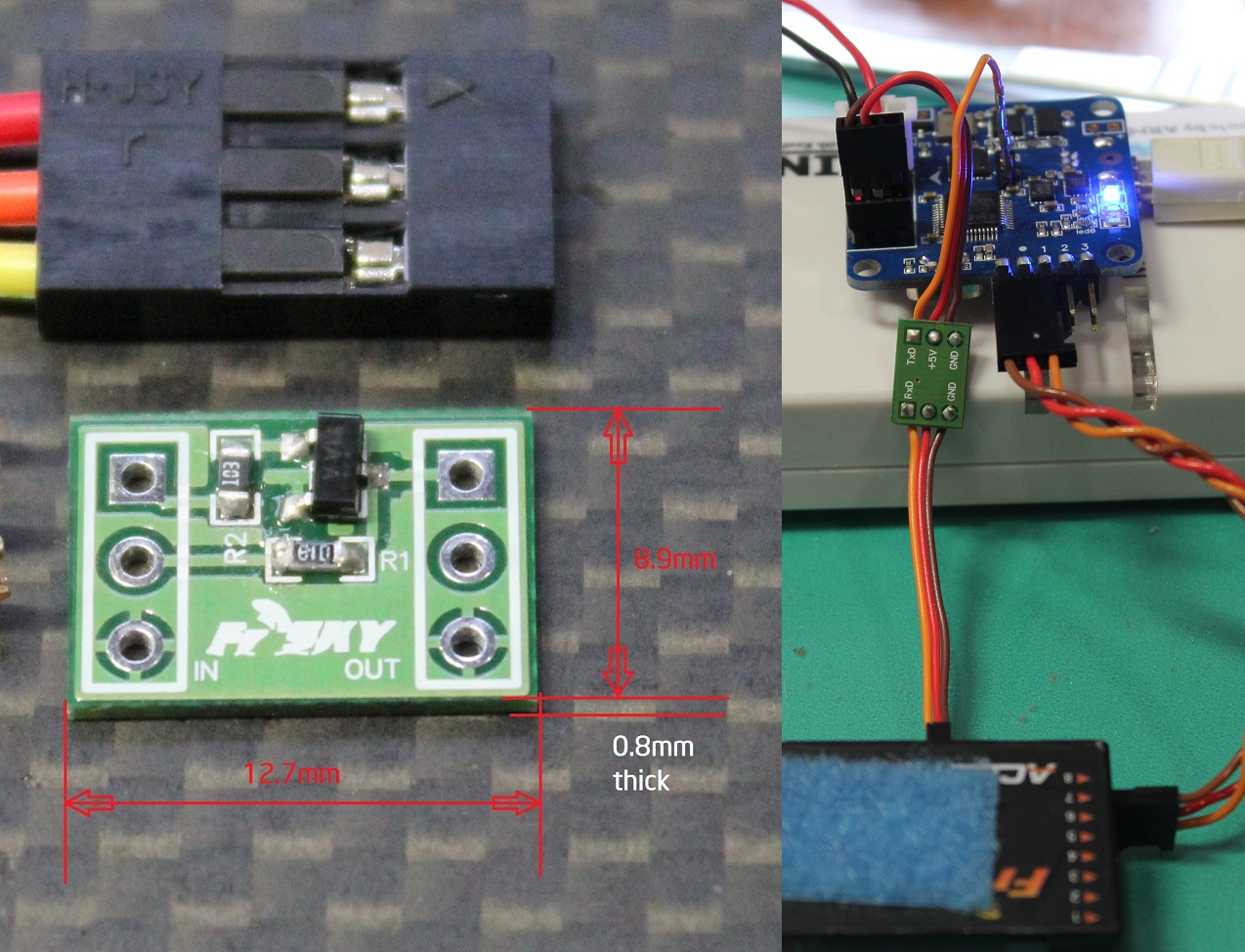
These code segments are meant for MW 2.0. To test this you need a Mega, a level converter and a telemetry capable FrSky reciever/transmitter combination. I've used a small lever converter from Ebay and a flashed 9x to display the data, but i'm not certain that the FrSky implementation from the er9x branch is complete and error-free.
The FrSky hub sends 3 different packets:
Frame 1 is send each 200ms. Basically some voltage, temperature and altitude information.
Frame 2 is send each second. I think the most interesting stuff: GPS, Speed, Fuel.
Frame 3 is send each 5s and only consists date and time information. Not very useful.
The example code only transmits the current GPS position. The rest is static demo data from the FrSky Frame Protocal datasheet.
config.h - somewhere around line 347
Code: Select all
/* Frsky Telemetry Output */
#define TELEMETRY_FRSKY
#define TELEMETRY_FRSKY_SERIAL 3
MultiWii_2_0.ino - line 113
Code: Select all
#if defined(TELEMETRY_FRSKY)
static uint32_t telemetryFrskyTimeFrame1 = 0, telemetryFrskyTimeFrame2 = 0, telemetryFrskyTimeFrame3 = 0;
#endif
MultiWii_2_0.ino - line 350 - at the end of annexCode() function
Code: Select all
#if defined(TELEMETRY_FRSKY)
telemetry_frsky();
#endif
LCD.ino - at the end
Code: Select all
#if defined(TELEMETRY_FRSKY)
void send_frsky_frame(byte* data, int len )
{
uint8_t bytestuff = 0;
for (uint8_t i=0;i<len;i++)
{
if ( ( data[i] == 0x5E || data[i] == 0x5e ) && bytestuff > 0 && bytestuff < 4 )
{
SerialWrite(TELEMETRY_FRSKY_SERIAL, 0x5D );
SerialWrite(TELEMETRY_FRSKY_SERIAL, 0x3E );
bytestuff++;
}
else if ( data[i] == 0x5D || data[i] == 0x5d )
{
SerialWrite(TELEMETRY_FRSKY_SERIAL, 0x5D );
SerialWrite(TELEMETRY_FRSKY_SERIAL, 0x3D );
bytestuff++;
}
else
{
SerialWrite(TELEMETRY_FRSKY_SERIAL, data[i] );
if ( data[i] == 0x5E || data[i] == 0x5e )
{
bytestuff=1;
}
else
{
bytestuff++;
}
}
}
}
// convert dd.ddddd format into ddmm
uint16_t GPS_degrees_to_ddmm(uint32_t i) {
return (int)( ( ( ( i - ( (int)( i / 100000 ) * 100000 ) ) * 0.6 ) + ( (int)( i / 100000 ) * 100000 ) ) / 1000 );
}
// convert dd.ddddd format into mmmm
uint16_t GPS_degrees_to_mmmm(uint32_t i) {
uint32_t n = ( i - ( (int)( i / 100000 ) * 100000 ) ) * 6;
return ( n - ( (int)( n / 10000 ) * 10000 ) );
}
void telemetry_frsky() {
// Frame 1: Three-axis Acceleration Values, Altitude (variometer-0.01m), Temperature1, Temperature2, Voltage, Current & Voltage (Ampere Sensor) , RPM
if (currentTime > telemetryFrskyTimeFrame1 + 200000 ) { // 200ms
uint16_t rpm = 0;
for (uint8_t i=0;i<NUMBER_MOTOR;i++)
{
rpm=rpm+motor[i];
}
rpm=rpm/NUMBER_MOTOR/30;
byte data[49] = {0x5E, 0x24, 0x00, 0x04, // Three-axis Acceleration Values x
0x5E, 0x25, 0x80, 0xFF, // Three-axis Acceleration Values y
0x5E, 0x26, 0xE0, 0xFE, // Three-axis Acceleration Values z
0x5E, 0x10, 0x3C, 0x00, // Altitude
0x5E, 0x21, 0x3C, 0x00, // Altitude
0x5E, 0x02, 0xEF, 0xFF, // Temperature1
0x5E, 0x05, 0xE9, 0xFF, // Temperature2
0x5E, 0x06, 0x18, 0x34, // Volt
0x5E, 0x28, 0x02, 0x00, // Current & Voltage (Ampere Sensor) Current
0x5E, 0x3A, 0x0a, 0x00, // Current & Voltage (Ampere Sensor) Voltage
0x5E, 0x3B, 0x05, 0x00, // Current & Voltage (Ampere Sensor) Voltage
0x5E, 0x03, rpm, rpm>>8, // RPM
0x5E};
send_frsky_frame(data, 49);
telemetryFrskyTimeFrame1 = currentTime;
}
// Frame 2: Course, Latitude, Longitude, Speed, Altitude (GPS), Fuel Level
if ( currentTime > telemetryFrskyTimeFrame2 + 1000000 ) { // 1s
uint16_t lat_ddmm = GPS_degrees_to_ddmm(GPS_latitude);
uint16_t lat_mmmm = GPS_degrees_to_mmmm(GPS_latitude);
uint16_t lon_ddmm = GPS_degrees_to_ddmm(GPS_longitude);
uint16_t lon_mmmm = GPS_degrees_to_mmmm(GPS_longitude);
byte data[53] = {0x5E,0x14,0x2c,0x00, // Course
0x5E,0x1c,0x03,0x00, // Course
0x5E,0x13,lat_ddmm, lat_ddmm>>8, // Latitude
0x5E,0x1b,lat_mmmm, lat_mmmm>>8, // Latitude
0x5E,0x23,0x4E,0x00, // N/S [4E|53]
0x5E,0x12,lon_ddmm, lon_ddmm>>8, // Longitude
0x5E,0x1a,lon_mmmm, lon_mmmm>>8, // Longitude
0x5E,0x22,0x45,0x00, // E/W [45|57]
0x5E,0x11,0x00,0x00, // Speed (GPS)
0x5E,0x19,0x93,0x00, // Speed (GPS)
0x5E,0x01,0x02,0x00, // Altitude (GPS)
0x5E,0x09,0x00,0x00, // Altitude (GPS)
0x5E,0x04,0x64,0x00, // Fuel Level
0x5E};
send_frsky_frame(data, 53);
telemetryFrskyTimeFrame2 = currentTime;
}
// Frame 3: Date, Time
if (currentTime > telemetryFrskyTimeFrame3 + 5000000 ) { // 5s
byte data[17] = {0x5E, 0x15, 0x0F, 0x07, // Date/Month
0x5E, 0x16, 0x0B, 0x00, // Year
0x5E, 0x17, 0x06, 0x12, // Hour/Minute
0x5E, 0x18, 0x32, 0x00, // Second
0x5E };
send_frsky_frame(data,17);
telemetryFrskyTimeFrame3 = currentTime;
}
}
#endif //TELEMETRY_FRSKY
I currently have only two STM32 and a 328 copter, hence I've suspended the project at the moment, but maybe someone could use some bits and pieces.