Naze32 hardware discussion thread
Re: Naze32 hardware discussion thread
Anyhow, the stuff you are describing can't happen. So, I'm gonna guess either dodgy hardware connections or something similar.

Re: Naze32 hardware discussion thread
Hi,
today I tested Crius CN-06 GPS Receiver Module + dev. version r218 GPS in PWM input mode im my Naze32 ref4 Micro copter.
Results:
Hardware:
Crius GPS works ok (like Rabbit GPS, eg. gps_type = 1, gps_baudrate = 57600 ).
Software(?):
GPS Hold: workes fine,
GPS Home: copter is confused (begins to yaw, can't find waypoint, like reported in r212: viewtopic.php?f=22&t=2387&start=90#p22426 in same Micro copter)
Plan:
Switch my copters / Naze32 boards = check for non-software related porblems:
- Naze32 blue ref3 to my Micro Copter (now ref4 + PMW),
- Naze32 white ref4 to Bug-Copter (now ref3 + PPM): 1st test PMW and if same problems: change to PPM RX.
today I tested Crius CN-06 GPS Receiver Module + dev. version r218 GPS in PWM input mode im my Naze32 ref4 Micro copter.
Results:
Hardware:
Crius GPS works ok (like Rabbit GPS, eg. gps_type = 1, gps_baudrate = 57600 ).
Software(?):
GPS Hold: workes fine,
GPS Home: copter is confused (begins to yaw, can't find waypoint, like reported in r212: viewtopic.php?f=22&t=2387&start=90#p22426 in same Micro copter)
Plan:
Switch my copters / Naze32 boards = check for non-software related porblems:
- Naze32 blue ref3 to my Micro Copter (now ref4 + PMW),
- Naze32 white ref4 to Bug-Copter (now ref3 + PPM): 1st test PMW and if same problems: change to PPM RX.
Re: Naze32 hardware discussion thread
I've been trying to educate myself a little about the stm32's and the programming tools and just like a box of chocolates.... you never know what you gonna find on the net.
timecop is everywhere.... http://www.youtube.com/watch?v=4gwAFDoSIsU&feature=related
also found this http://blog.tkjelectronics.dk/category/tkjelectronics/ a new stm discovery board with 9DOF
timecop is everywhere.... http://www.youtube.com/watch?v=4gwAFDoSIsU&feature=related
also found this http://blog.tkjelectronics.dk/category/tkjelectronics/ a new stm discovery board with 9DOF
Re: Naze32 hardware discussion thread
Too bad they are using that gyro. 
yawstick wrote:I've been trying to educate myself a little about the stm32's and the programming tools and just like a box of chocolates.... you never know what you gonna find on the net.
timecop is everywhere.... http://www.youtube.com/watch?v=4gwAFDoSIsU&feature=related
also found this http://blog.tkjelectronics.dk/category/tkjelectronics/ a new stm discovery board with 9DOF
Re: Naze32 hardware discussion thread
yawstick wrote:I've been trying to educate myself a little about the stm32's and the programming tools and just like a box of chocolates.... you never know what you gonna find on the net.
also found this http://blog.tkjelectronics.dk/category/tkjelectronics/ a new stm discovery board with 9DOF
since F3 is API and peripheral compatible... Baseflight should just run it as-is, assuming someone gets LSM303 driver on there (which shouldn't be hard since MWC already supports it I believe.
Still need to do proper sensor orientation stuff in baseflight so the orientation can be dynamically changed for specific hardware config.
Re: Naze32 hardware discussion thread
LeoWie wrote:GPS Home: copter is confused (begins to yaw, can't find waypoint, like reported in r212: viewtopic.php?f=22&t=2387&start=90#p22426 in same Micro copter)
Probably not fully calibrated mag and/or too much mag interference that can't be calibrated out.
Re: Naze32 hardware discussion thread
timecop wrote:LeoWie wrote:GPS Home: copter is confused (begins to yaw, can't find waypoint, like reported in r212: viewtopic.php?f=22&t=2387&start=90#p22426 in same Micro copter)
Probably not fully calibrated mag and/or too much mag interference that can't be calibrated out.
Yes - I also think so: everything is very small in the Micro Copter (160mm, <200g) an I found no coding, that should confuse the copter on any switch.
So I moved exactly the same components to my Bug-Copter - see pics. This Coper is also small (300mm, <750g), but the distance between FC <- > GPS / ESCs / LipoAlarm can be at least 80+mm.
New test report later.
- Attachments
-
-
Last edited by LeoWie on Sat Sep 15, 2012 9:09 pm, edited 1 time in total.
-
NikTheGreek

- Posts: 348
- Joined: Thu Dec 08, 2011 4:17 pm
- Location: Greece
- Contact:
Re: Naze32 hardware discussion thread
Hi
I show in this link http://blog.tkjelectronics.dk/category/tkjelectronics/ that the evaluation kit costs 10$.
Any idea how can i order one ?
I show in this link http://blog.tkjelectronics.dk/category/tkjelectronics/ that the evaluation kit costs 10$.
Any idea how can i order one ?
Re: Naze32 hardware discussion thread
It's not available until the end of October, at least.
Re: Naze32 hardware discussion thread
Test dev.ver. r218 GPS PMW input mode
Video: http://youtu.be/66Ris-rxHFo
Test results: ok
Details:
It was windy ... never lost a waypoint. After wind attacks the copter sometimes makes a big circle or a spiral to come back to the area of the waypoint (never totally stable when wind like this), but never oscilating away with the wind (what another FC always did).
GPS problems reported yesterday are copter/interference related. The problem was the distance of the components FC : GPS, ECS's, buzzers ... should be 80mm or more.
Test copter components:
'Bug'-Copter, frame home grown CFK (90% d=4 mm)
- Naze32
- Crius CN-06 GPS Receiver Module (out of the box)
- Frame (b x l): 260 xs 300mm motor-motor
- Motors HK Tgy SK2822-1200
- Props 8"
- ESC's HK-20Ah ESC's (not programmable)
- RX DSM2 6CH
- LiPo HK Zippy 3S 2200mAh 40C
- tow: 700g
- Flight time 10+ min
Video: http://youtu.be/66Ris-rxHFo
Test results: ok
Details:
It was windy ... never lost a waypoint. After wind attacks the copter sometimes makes a big circle or a spiral to come back to the area of the waypoint (never totally stable when wind like this), but never oscilating away with the wind (what another FC always did).
GPS problems reported yesterday are copter/interference related. The problem was the distance of the components FC : GPS, ECS's, buzzers ... should be 80mm or more.
Test copter components:
'Bug'-Copter, frame home grown CFK (90% d=4 mm)
- Naze32
- Crius CN-06 GPS Receiver Module (out of the box)
- Frame (b x l): 260 xs 300mm motor-motor
- Motors HK Tgy SK2822-1200
- Props 8"
- ESC's HK-20Ah ESC's (not programmable)
- RX DSM2 6CH
- LiPo HK Zippy 3S 2200mAh 40C
- tow: 700g
- Flight time 10+ min
Re: Naze32 hardware discussion thread
flash those esc and it will be even more awesome.
Re: Naze32 hardware discussion thread
I have a very important and pertinent question: what is the proper pronunciation of Naze?
Re: Naze32 hardware discussion thread
bicycle wrote:I have a very important and pertinent question: what is the proper pronunciation of Naze?
「なぜ」です。
For all な like english "now" minus the "u" sound, and ぜ like english "Zen" without the "n".
Re: Naze32 hardware discussion thread
timecop wrote:flash those esc and it will be even more awesome.
Thanks for the hint. I had a look: I have this 4 + 6 on another copter + 6 spare; all older than 2 years ... so enough to test and I think I also have all adapters needed ... and there are useful links in RCG I think. I will have a try.
Re: Naze32 hardware discussion thread
LeoWie - can please you tell me if the Crius CN-06 can be hooked up to 5V (ESC / receiver) or will I need to dig for 3V ?
Also at what gps_baudrate are you running it in your test ?
Thanks in advance
Also at what gps_baudrate are you running it in your test ?
Thanks in advance
Re: Naze32 hardware discussion thread
simply plug in Naze ch5 or 6 +/- (5v), 57k baud
Re: Naze32 hardware discussion thread
Dont know if this is a candidate for anything but the numbers are pretty astounding.
http://www.kickstarter.com/projects/pau ... -arduino-a
http://www.kickstarter.com/projects/pau ... -arduino-a
Re: Naze32 hardware discussion thread
Question for any Spektrum Satellite users:
I can take a DSM2 satellite, and bind it to my TX, either with a receiver or via an Arduino sketch. I then hook it up to the Naze, powerup, and it works fine, once. At the next powerup, the Satellite goes back into bind mode. I've tried setting the GPIO input to nopull, pull up, and pull down, with the same behavior. Must be doing something wrong, but what?
I've also tried binding the satellite RX as master rx, and still observe the same behavior. Also worth mentioning that this has been via USB power, have not tried sourcing 5 volts to the Naze.
Thanks in advance for any insight.
John
I can take a DSM2 satellite, and bind it to my TX, either with a receiver or via an Arduino sketch. I then hook it up to the Naze, powerup, and it works fine, once. At the next powerup, the Satellite goes back into bind mode. I've tried setting the GPIO input to nopull, pull up, and pull down, with the same behavior. Must be doing something wrong, but what?
I've also tried binding the satellite RX as master rx, and still observe the same behavior. Also worth mentioning that this has been via USB power, have not tried sourcing 5 volts to the Naze.
Thanks in advance for any insight.
John
Re: Naze32 hardware discussion thread
jihlein wrote:Question for any Spektrum Satellite users:
I can take a DSM2 satellite, and bind it to my TX, either with a receiver or via an Arduino sketch. I then hook it up to the Naze, powerup, and it works fine, once. At the next powerup, the Satellite goes back into bind mode. I've tried setting the GPIO input to nopull, pull up, and pull down, with the same behavior. Must be doing something wrong, but what?
I've also tried binding the satellite RX as master rx, and still observe the same behavior. Also worth mentioning that this has been via USB power, have not tried sourcing 5 volts to the Naze.
Thanks in advance for any insight.
John
John,
I had similiar problems with this when using 5volt supply. I ended up using the OP spektrum adaptor to supply 3.3?volts and from that point on has been 100% reliable. For whatever reason the higher voltage caused erratic behaviour.
David.
Re: Naze32 hardware discussion thread
Hello I'm new here I am wanting to get one of these flight controllers all I need to know is how hard is it to set up
Thanks
Thanks
Re: Naze32 hardware discussion thread
davidwp56 wrote:John,
I had similiar problems with this when using 5volt supply. I ended up using the OP spektrum adaptor to supply 3.3?volts and from that point on has been 100% reliable. For whatever reason the higher voltage caused erratic behaviour.
David.
spektrum sat is a 3v device, I'm surprised it still works after 5v.
Re: Naze32 hardware discussion thread
If u can follow the first post, not hard at all. Also u need to know how to set up a multiwii fc, again, all steps are listed around here . And not be using a vibrator dji frame.
Bob
Bob
tech69x wrote:Hello I'm new here I am wanting to get one of these flight controllers all I need to know is how hard is it to set up
Thanks
Re: Naze32 hardware discussion thread
timecop wrote:davidwp56 wrote:John,
I had similiar problems with this when using 5volt supply. I ended up using the OP spektrum adaptor to supply 3.3?volts and from that point on has been 100% reliable. For whatever reason the higher voltage caused erratic behaviour.
David.
spektrum sat is a 3v device, I'm surprised it still works after 5v.
Yes your right TC, not thinking I hooked up to 5volts a number of times, for some strange outcomes, but the sat survived, installed the adaptor and still flying with it up till last week when I finally sorted out a Frsky install into my DSX9 and now using CPPM with D4FR-ll receiver.
David.
Re: Naze32 hardware discussion thread
davidwp56 wrote:(posted @ rcg)
If anyone else can help me out with this it would be appreciated, just need to know how the Frsky D4R-ll receiver can be hooked up to the board with telemetry adapter.
There's pinout on the bottom of D4FR-II. RX/TX/GND/A2 or something similar.
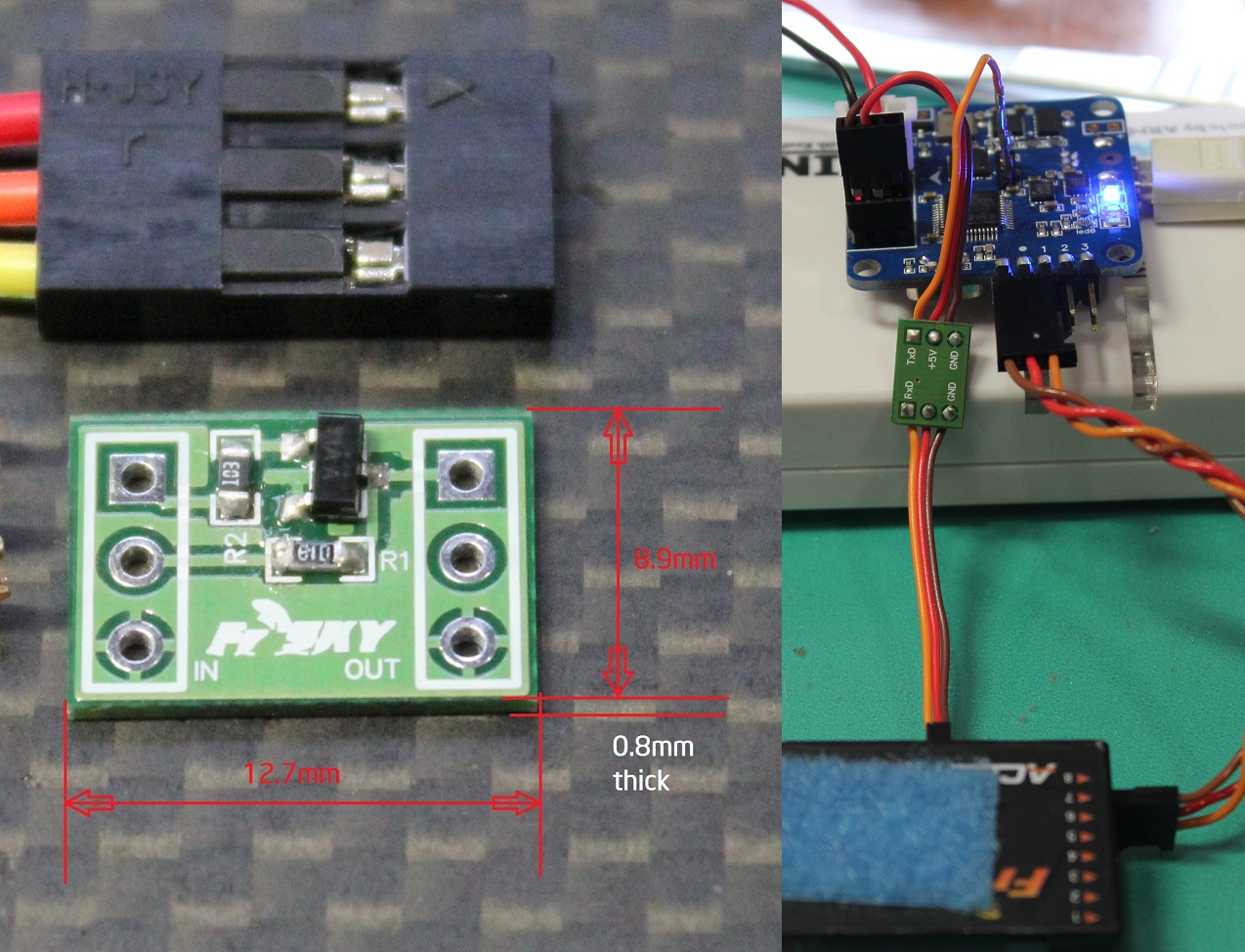
Wire up the frsky adapter as shown in the pic here : http://abusemark.com/store/images/frskyadp.jpg
{kind=link}
Then take 'RxD' and GND parts from the frsky end of adapter and connect to RX + GND wires on the D4FR-II.
You can snip off TX and A2 lines as they won't be used.
Re: Naze32 hardware discussion thread
This gets more interesting. With either a DSM2 and DSMX satellite, it works perfectly if I turn on the FC board/Satellite first, followed by the TX. With the reverse power up sequence, it looks as if the satellite is not getting a valid signal. It, along with the TX must be powered down, and then the "proper" power sequence applied and all is good again.
I'm powering the satellite from the 3.3 volt regulator on the Naze. Grabbed 3.3 volts from the BOOT0 jumper pad, bigger target for soldering.......
I'm powering the satellite from the 3.3 volt regulator on the Naze. Grabbed 3.3 volts from the BOOT0 jumper pad, bigger target for soldering.......
Re: Naze32 hardware discussion thread
MTK testers (anyone ?) be cautious - possibly another case of control loss in PH
http://www.rcgroups.com/forums/showpost ... tcount=425
http://www.rcgroups.com/forums/showpost ... tcount=425
Re: Naze32 hardware discussion thread
@jihein
if I remember correctly, dsm sat bind is done by keeping the signal line high or something. so probably related.
if I remember correctly, dsm sat bind is done by keeping the signal line high or something. so probably related.
Re: Naze32 hardware discussion thread
timecop wrote:davidwp56 wrote:(posted @ rcg)
If anyone else can help me out with this it would be appreciated, just need to know how the Frsky D4R-ll receiver can be hooked up to the board with telemetry adapter.
There's pinout on the bottom of D4FR-II. RX/TX/GND/A2 or something similar.
Wire up the frsky adapter as shown in the pic here : http://abusemark.com/store/images/frskyadp.jpg
Then take 'RxD' and GND parts from the frsky end of adapter and connect to RX + GND wires on the D4FR-II.
You can snip off TX and A2 lines as they won't be used.
Thanks TC,
Will see how I go, am liking this Frsky stuff..
David
Re: Naze32 hardware discussion thread
jihlein wrote:This gets more interesting. With either a DSM2 and DSMX satellite, it works perfectly if I turn on the FC board/Satellite first, followed by the TX. With the reverse power up sequence, it looks as if the satellite is not getting a valid signal. It, along with the TX must be powered down, and then the "proper" power sequence applied and all is good again.
I'm powering the satellite from the 3.3 volt regulator on the Naze. Grabbed 3.3 volts from the BOOT0 jumper pad, bigger target for soldering.......
John,
This is the sort of behavior I got when using the 5volt supply, but just a thought have you tried to change the spektrum receiver setting in CLI, "Spektrum_hires" to 1? Worked set to zero for me but I was using a satellite off a 6200 DSM2 receiver.
David.
Re: Naze32 hardware discussion thread
a944734 wrote:MTK testers (anyone ?) be cautious - possibly another case of control loss in PH
http://www.rcgroups.com/forums/showpost ... tcount=425
... on the way / in about 2 weeks I'll test "MediaTek MTK3329 GPS Module " (e.g. http://www.goodluckbuy.com/mediatek-mtk ... ation.html ).
Re: Naze32 hardware discussion thread
LeoWie wrote:a944734 wrote:MTK testers (anyone ?) be cautious - possibly another case of control loss in PH
http://www.rcgroups.com/forums/showpost ... tcount=425
... on the way / in about 2 weeks I'll test "MediaTek MTK3329 GPS Module " (e.g. http://www.goodluckbuy.com/mediatek-mtk ... ation.html ).
why so old?
MTK3339 now is current.
u-BLOX-6 has also proved successful.
is the better choice.
CN-06 GPS Receiver V2.0
Re: Naze32 hardware discussion thread
@ Jürgen
 u-BLOX-6 / CN-06 GPS Receiver:
u-BLOX-6 / CN-06 GPS Receiver:
fully agree ( see viewtopic.php?f=22&t=2387&start=150#p22841 , viewtopic.php?f=22&t=2387&start=150#p22864 ... )
MediaTek MTK3329 GPS Module:
I wanted "... indicator light,flashing under the serch mode,stop lighting after 3D Lock ..." and something that ships within 2 days and I like it old school with componants that are easy to replace when again toasting something and I wanted a MTK Module on the someone-tested-it components list.
and I wanted a MTK Module on the someone-tested-it components list.
And I did not know that there is a new http://www.trenz-electronic.de/fileadmi ... minary.pdf , looks good, thanks for the link.
fully agree ( see viewtopic.php?f=22&t=2387&start=150#p22841 , viewtopic.php?f=22&t=2387&start=150#p22864 ... )
I wanted "... indicator light,flashing under the serch mode,stop lighting after 3D Lock ..." and something that ships within 2 days and I like it old school with componants that are easy to replace when again toasting something
And I did not know that there is a new http://www.trenz-electronic.de/fileadmi ... minary.pdf , looks good, thanks for the link.
Re: Naze32 hardware discussion thread
This is the sort of behavior I got when using the 5volt supply, but just a thought have you tried to change the spektrum receiver setting in CLI, "Spektrum_hires" to 1? Worked set to zero for me but I was using a satellite off a 6200 DSM2 receiver.
David,
From looking at the satellite serial stream, it's definitely in 7 channel low res mode. I can also bind it in what appears to be nine channel low res mode. Using a JR PCM10 radio with the Spektrum module. Trying to find the bind code for hires. It's unclear to me if DCM2 can do hires, or if that is what DCMX is.
I'm also using some custom code. It's basically the baseflight drivers with various updates, the rest is entirely different. But I observed the same behavior on the standard baseFlight code too.
John
Micro Naze32 200g Cam-Copter
Micro Naze32 is a real (KeyChain)Cam-Copter now!  -> viewtopic.php?f=12&t=2475
-> viewtopic.php?f=12&t=2475
Re: Naze32 hardware discussion thread
.
GPS interference is always a problem.
a protective against GPS interference.
is not to be underestimated

- http://flyduino.net/Groundplane-for-GPS

GPS interference is always a problem.
a protective against GPS interference.
is not to be underestimated
- http://flyduino.net/Groundplane-for-GPS
Re: Naze32 hardware discussion thread
noob here.
I got the white pcb version (with MS5611 baro) from abusemark.
I flashed it with the latest baseflight firmware just now. I opened MultiWii GUI 2.1
I can see ALL the sensors working fine, except the baro.
What do I need to do to get the baro to work?
I've downloaded ms5611.h and ms5611.c from the Kcopter thread on RCG. What do I do with these?
Thanks!
I got the white pcb version (with MS5611 baro) from abusemark.
I flashed it with the latest baseflight firmware just now. I opened MultiWii GUI 2.1
I can see ALL the sensors working fine, except the baro.
What do I need to do to get the baro to work?
I've downloaded ms5611.h and ms5611.c from the Kcopter thread on RCG. What do I do with these?
Thanks!
Re: Naze32 hardware discussion thread
A very intersting link - thx Jürgen.
Do you think CFK material would work? .. or alu? ... or copper?
Do you think CFK material would work? .. or alu? ... or copper?
JUERGEN_ wrote:.
GPS interference is always a problem.
a protective against GPS interference.
is not to be underestimated
[img] ...
Re: Naze32 hardware discussion thread
No, it needs to be copper - the point is a ground plane.
Well, PCB material anyway - its all soldered together and forms a large copper plane. I've definitely noticed improvement of signal dB levels by placing GPS on top of a large piece of pcb clad.
Well, PCB material anyway - its all soldered together and forms a large copper plane. I've definitely noticed improvement of signal dB levels by placing GPS on top of a large piece of pcb clad.
Re: Naze32 hardware discussion thread
LeoWie wrote:A very intersting link - thx Jürgen.
Do you think CFK material would work? .. or alu? ... or copper?
ALU problem, contact with GND
but better than nothing.
timecop wrote:.... I've definitely noticed improvement of signal dB levels
by placing GPS on top of a large piece of pcb clad.
even more important
signal - noise ratio (SNR)
better still a large antenna.
not 16x16mm.
but 35x35mm , used bei AutoQuad,
Last edited by JUERGEN_ on Tue Sep 18, 2012 1:29 pm, edited 1 time in total.
Re: Naze32 hardware discussion thread
vineetp wrote:noob here.
I got the white pcb version (with MS5611 baro) from abusemark.
I flashed it with the latest baseflight firmware just now. I opened MultiWii GUI 2.1
I can see ALL the sensors working fine, except the baro.
What do I need to do to get the baro to work?
I've downloaded ms5611.h and ms5611.c from the Kcopter thread on RCG. What do I do with these?
Thanks!
You didn't read first post.
"Latest" for 5611 support = latest from SVN.
The one in /downloads = old
Re: Naze32 hardware discussion thread
I need some help regarding Auto Level / Acc.
Just put my FreeFlight 1.20 running the latest Baseflight on my brand new Tricopter. It is flying completely awesome in rate mode. But for FPV, AP and the occational loss of orientation it is very nice to be able to kick in the acc and let it auto level.
The problem is that I can't seem to find the right settings. Auto Level is simply very unpredictable. It is drifting and dancing.
The frame is a Hobbyking Talon Tricopter V1. Balanced 8" GAUI Slowflyer props. Balanced 2216 900KV T-Motors. 4S 2200 mAh TGY Nano Batteries. SimonK-flashed HK F30A ESCS.
I've calibrated the acc several times. When holding the tri in stable mode it feels like the acc is doing its job. But when flying it is unpredictable.
Any suggestions? Current settings in the screen shot.
Just put my FreeFlight 1.20 running the latest Baseflight on my brand new Tricopter. It is flying completely awesome in rate mode. But for FPV, AP and the occational loss of orientation it is very nice to be able to kick in the acc and let it auto level.
The problem is that I can't seem to find the right settings. Auto Level is simply very unpredictable. It is drifting and dancing.
The frame is a Hobbyking Talon Tricopter V1. Balanced 8" GAUI Slowflyer props. Balanced 2216 900KV T-Motors. 4S 2200 mAh TGY Nano Batteries. SimonK-flashed HK F30A ESCS.
I've calibrated the acc several times. When holding the tri in stable mode it feels like the acc is doing its job. But when flying it is unpredictable.
Any suggestions? Current settings in the screen shot.
- Attachments
-
Re: Naze32 hardware discussion thread
fix looptime to 3000 or 4000, set acc_lpf to around 100.
Re: Naze32 hardware discussion thread
Thank you! Have now set the acc_lpf to 100. But I can't seem to find a place to adjust the looptime?
Re: Naze32 hardware discussion thread
same place, under set.
set looptime=whatever.
you should be running latest svn firmware too, not the one released on /downloads page
set looptime=whatever.
you should be running latest svn firmware too, not the one released on /downloads page
Re: Naze32 hardware discussion thread
timecop wrote:You didn't read first post.
"Latest" for 5611 support = latest from SVN.
The one in /downloads = old
You mean baseflightplus.hex or just baseflight.hex under SVN?
Thanks.
Re: Naze32 hardware discussion thread
First post and the manual are pretty clear about "baseflight".
Re: Naze32 hardware discussion thread
timecop wrote:same place, under set.
set looptime=whatever.
you should be running latest svn firmware too, not the one released on /downloads page
WOW! Thank you so much.
I grabbed the latest baseflight from SVN, left the default PIDs, added a bit of rate, zeroed the expo, bumped the acc_lpf to 100 and looptime to 3500. Calibrated the acc and:
Now that's one smooth tricopter! Stable as a table. And lovely, predictable auto level just the way I want it too! Now I just have to go home and solder that baro I have lying in a box and this machine will let me fly both acro and those long lazy sight seeing FPV-tours.
Re: Naze32 hardware discussion thread
Ok, thanks.
Re: Naze32 hardware discussion thread
I just got my Naze32 - I have it configured and will try to maiden it tonight or this weekend. My initial reaction: this thing is really well built and super small.