improving altitude hold
Posted: Wed Jun 01, 2016 9:33 am
Hi,
I am looking to improve the altitude hold in MW. In the past I implemented my own FC and the alt hold was based on Arducopter code. The alt hold worked brilliantly, I could engage it in any scenario (there was no need for stable fight beforehand), it also worked a treat in all weather conditions.
I've never managed to achieve anything similar to that in MW.
Are there any views on this (licencing should be ok), any obstacles, anything else before I dive into this again? It might be a little bit on a heavy side (size- and computation wise) but would this be a problem?
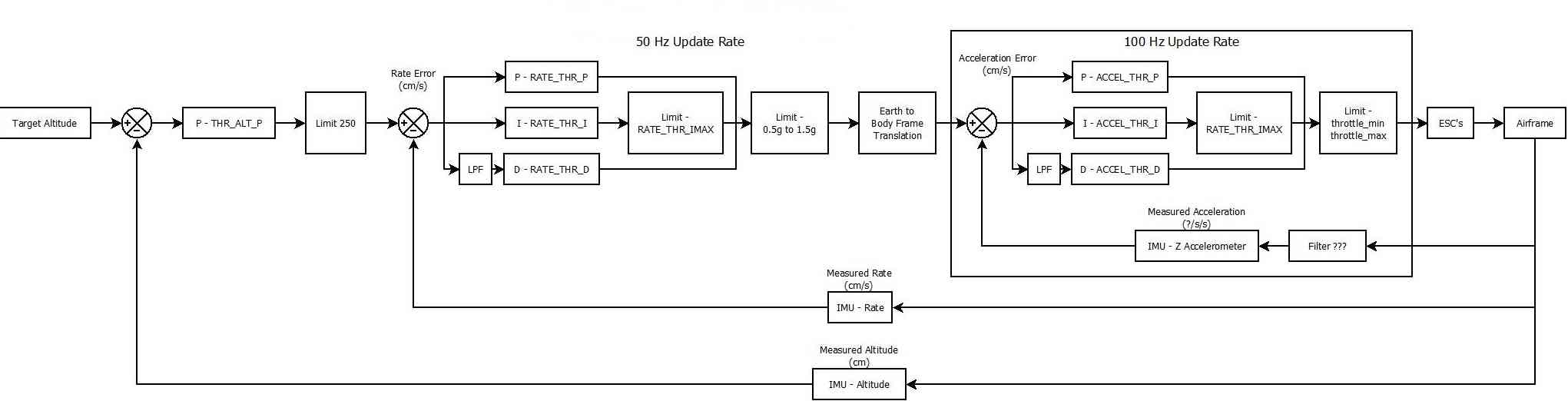
Here is an overview of the approach. AFAIK the code loosely follows the diagram:
http://ardupilot.org/copter/_images/Alt ... -3.0.1.jpg
I am looking to improve the altitude hold in MW. In the past I implemented my own FC and the alt hold was based on Arducopter code. The alt hold worked brilliantly, I could engage it in any scenario (there was no need for stable fight beforehand), it also worked a treat in all weather conditions.
I've never managed to achieve anything similar to that in MW.
Are there any views on this (licencing should be ok), any obstacles, anything else before I dive into this again? It might be a little bit on a heavy side (size- and computation wise) but would this be a problem?
Here is an overview of the approach. AFAIK the code loosely follows the diagram:
http://ardupilot.org/copter/_images/Alt ... -3.0.1.jpg
{kind=link}