MultiWii 2.4 connected on Cleanflight and Baseflight
-
jaysonragasa

- Posts: 53
- Joined: Wed Jan 28, 2015 6:40 am
- Location: Philippines
- Contact:
MultiWii 2.4 connected on Cleanflight and Baseflight
Works great in Baseflight and 90% in Cleanflight. That's because cleanflight does not use boxnames.
-
mehmetyld87

- Posts: 25
- Joined: Wed Feb 18, 2015 2:50 pm
- Location: Ankara
Re: MultiWii 2.4 connected on Cleanflight and Baseflight
How did you achieved that?
-
jaysonragasa
- Posts: 53
- Joined: Wed Jan 28, 2015 6:40 am
- Location: Philippines
- Contact:
Re: MultiWii 2.4 connected on Cleanflight and Baseflight
mehmetyld87 wrote:How did you achieved that?
lot's of additional MSP lines
-
mehmetyld87
- Posts: 25
- Joined: Wed Feb 18, 2015 2:50 pm
- Location: Ankara
Re: MultiWii 2.4 connected on Cleanflight and Baseflight
Could you share us ?
-
jaysonragasa
- Posts: 53
- Joined: Wed Jan 28, 2015 6:40 am
- Location: Philippines
- Contact:
Re: MultiWii 2.4 connected on Cleanflight and Baseflight
sure I could do that
-
mehmetyld87
- Posts: 25
- Joined: Wed Feb 18, 2015 2:50 pm
- Location: Ankara
Re: MultiWii 2.4 connected on Cleanflight and Baseflight
Thanks for your support
Re: MultiWii 2.4 connected on Cleanflight and Baseflight
is there a guide on how to do this?
Re: MultiWii 2.4 connected on Cleanflight and Baseflight
I too am interested in how this is done .. 
-
jaysonragasa
- Posts: 53
- Joined: Wed Jan 28, 2015 6:40 am
- Location: Philippines
- Contact:
Re: MultiWii 2.4 connected on Cleanflight and Baseflight
ethanhunt wrote:is there a guide on how to do this?
Well it took me some time to properly implement the necessary protocols to be able to connect to baseflight and cleanflight.
What I can do is just to release a modified MultiWii 2.4 firmware with these new protocols so you can use it in baseflight. For the cleanflight, I discontinued working on it for the mean time because cleanflight is using different flight mode settings.
Re: MultiWii 2.4 connected on Cleanflight and Baseflight
jaysonragasa wrote:
Well it took me some time to properly implement the necessary protocols to be able to connect to baseflight and cleanflight.
What I can do is just to release a modified MultiWii 2.4 firmware with these new protocols so you can use it in baseflight. For the cleanflight, I discontinued working on it for the mean time because cleanflight is using different flight mode settings.
that sounds like a plan. do you already have the modified firmware?
-
jaysonragasa
- Posts: 53
- Joined: Wed Jan 28, 2015 6:40 am
- Location: Philippines
- Contact:
Re: MultiWii 2.4 connected on Cleanflight and Baseflight
Finally decided to put everything in GitHub.
Here's my version of MultiWii
https://github.com/Nullstr1ng/MultiWii/ ... ii/0.1.0.0
Here's my version of MultiWii
https://github.com/Nullstr1ng/MultiWii/ ... ii/0.1.0.0
-
mehmetyld87
- Posts: 25
- Joined: Wed Feb 18, 2015 2:50 pm
- Location: Ankara
Re: MultiWii 2.4 connected on Cleanflight and Baseflight
jaysonragasa wrote:Finally decided to put everything in GitHub.
Here's my version of MultiWii
https://github.com/Nullstr1ng/MultiWii/ ... ii/0.1.0.0
Thank you for great work
-
mehmetyld87
- Posts: 25
- Joined: Wed Feb 18, 2015 2:50 pm
- Location: Ankara
Re: MultiWii 2.4 connected on Cleanflight and Baseflight
Dear jaysonragasa;
When I try to compile HarotWii 0.1 , IDE gives " 'GPS_angle' was not declared in this scope" in PIDControllers.cpp file. I compiled it , manually giving "0" instead of "GPS_angle' value.
When I try to compile HarotWii 0.1 , IDE gives " 'GPS_angle' was not declared in this scope" in PIDControllers.cpp file. I compiled it , manually giving "0" instead of "GPS_angle' value.
-
jaysonragasa
- Posts: 53
- Joined: Wed Jan 28, 2015 6:40 am
- Location: Philippines
- Contact:
Re: MultiWii 2.4 connected on Cleanflight and Baseflight
new update
- corrected the folder and .ino filename
- fixed some conditions for definitions
- fixed GPS_angle issue in PIDControllers.cpp when GPS_Serial is not
defined
download now.
https://github.com/Nullstr1ng/MultiWii/ ... 0/HarotWii
- corrected the folder and .ino filename
- fixed some conditions for definitions
- fixed GPS_angle issue in PIDControllers.cpp when GPS_Serial is not
defined
download now.
https://github.com/Nullstr1ng/MultiWii/ ... 0/HarotWii
-
mehmetyld87
- Posts: 25
- Joined: Wed Feb 18, 2015 2:50 pm
- Location: Ankara
Re: MultiWii 2.4 connected on Cleanflight and Baseflight
Thanks for update, it works fine
-
mehmetyld87
- Posts: 25
- Joined: Wed Feb 18, 2015 2:50 pm
- Location: Ankara
Re: MultiWii 2.4 connected on Cleanflight and Baseflight
Dear jaysonragasa;
In your HarotWii code, Motor numbers as same as Multiwii ( example . QuadP-> Motor3 (rear = 9) ,Motor2 (right= 10) , Motor 4 (left = 11), Moto1 (front=3) )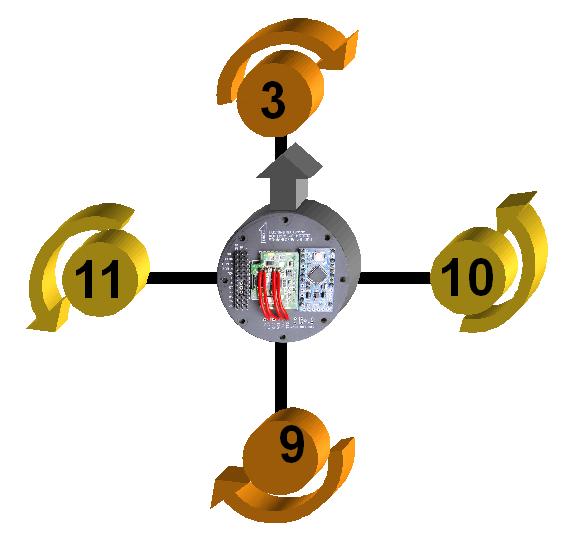
pin numbers are changed according to cleanflight ,When I test the motors from GUI, it works like below.

Thanks for your time and great work
In your HarotWii code, Motor numbers as same as Multiwii ( example . QuadP-> Motor3 (rear = 9) ,Motor2 (right= 10) , Motor 4 (left = 11), Moto1 (front=3) )
pin numbers are changed according to cleanflight ,When I test the motors from GUI, it works like below.
Thanks for your time and great work
Re: MultiWii 2.4 connected on Cleanflight and Baseflight
I hope people don't start using Gethub I absolutely hate that program!
Re: MultiWii 2.4 connected on Cleanflight and Baseflight
jaysonragasa wrote:
Works great in Baseflight and 90% in Cleanflight. That's because cleanflight does not use boxnames.
awesome program small enough to fit and turn on extras but i have a small problem when i #define I2C_GPS i get this
Arduino: 1.6.6 (Windows 8.1), Board: "Arduino Pro or Pro Mini, ATmega328 (5V, 16 MHz)"
In file included from sketch\MultiWii.cpp:27:0:
sketch\Protocol.h:22:27: warning: left shift count >= width of type [enabled by default]
FEATURE_LED_STRIP = 1 << 16,
^
sketch\Protocol.h:23:25: warning: left shift count >= width of type [enabled by default]
FEATURE_DISPLAY = 1 << 17,
^
sketch\Protocol.h:24:28: warning: left shift count >= width of type [enabled by default]
FEATURE_ONESHOT125 = 1 << 18,
^
sketch\Protocol.h:25:26: warning: left shift count >= width of type [enabled by default]
FEATURE_BLACKBOX = 1 << 19
^
sketch\PIDControllers.cpp:114:0: warning: "GYRO_I_MAX" redefined [enabled by default]
#define GYRO_I_MAX 256
^
sketch\PIDControllers.cpp:87:0: note: this is the location of the previous definition
#define GYRO_I_MAX 250
^
In file included from sketch\Protocol.cpp:11:0:
sketch\Protocol.h:22:27: warning: left shift count >= width of type [enabled by default]
FEATURE_LED_STRIP = 1 << 16,
^
sketch\Protocol.h:23:25: warning: left shift count >= width of type [enabled by default]
FEATURE_DISPLAY = 1 << 17,
^
sketch\Protocol.h:24:28: warning: left shift count >= width of type [enabled by default]
FEATURE_ONESHOT125 = 1 << 18,
^
sketch\Protocol.h:25:26: warning: left shift count >= width of type [enabled by default]
FEATURE_BLACKBOX = 1 << 19
^
In file included from sketch\RX.cpp:6:0:
sketch\Protocol.h:22:27: warning: left shift count >= width of type [enabled by default]
FEATURE_LED_STRIP = 1 << 16,
^
sketch\Protocol.h:23:25: warning: left shift count >= width of type [enabled by default]
FEATURE_DISPLAY = 1 << 17,
^
sketch\Protocol.h:24:28: warning: left shift count >= width of type [enabled by default]
FEATURE_ONESHOT125 = 1 << 18,
^
sketch\Protocol.h:25:26: warning: left shift count >= width of type [enabled by default]
FEATURE_BLACKBOX = 1 << 19
^
sketch\version.cpp:2:26: warning: deprecated conversion from string constant to 'char*' [-Wwrite-strings]
char *shortGitRevision = "1234"; //__REVISION__;
^
sketch\version.cpp:3:1: warning: deprecated conversion from string constant to 'char*' [-Wwrite-strings]
char *buildDate = __DATE__;
^
sketch\version.cpp:4:1: warning: deprecated conversion from string constant to 'char*' [-Wwrite-strings]
char *buildTime = __TIME__;
^
sketch\Protocol.cpp.o: In function `evaluateCommand(unsigned char)':
sketch/Protocol.cpp:820: undefined reference to `GPS_numCh'
sketch/Protocol.cpp:822: undefined reference to `GPS_numCh'
sketch/Protocol.cpp:822: undefined reference to `GPS_svinfo_chn'
sketch/Protocol.cpp:822: undefined reference to `GPS_svinfo_chn'
sketch/Protocol.cpp:822: undefined reference to `GPS_svinfo_svid'
sketch/Protocol.cpp:822: undefined reference to `GPS_svinfo_svid'
sketch/Protocol.cpp:822: undefined reference to `GPS_svinfo_quality'
sketch/Protocol.cpp:822: undefined reference to `GPS_svinfo_quality'
sketch/Protocol.cpp:822: undefined reference to `GPS_svinfo_cno'
sketch/Protocol.cpp:822: undefined reference to `GPS_svinfo_cno'
sketch/Protocol.cpp:823: undefined reference to `GPS_numCh'
collect2.exe: error: ld returned 1 exit status
exit status 1
Error compiling.
This report would have more information with
"Show verbose output during compilation"
enabled in File > Preferences.
can some one help please
Thank you Chris
-
Killertoad
- Posts: 1
- Joined: Fri Jun 24, 2016 11:45 am
Re: MultiWii 2.4 connected on Cleanflight and Baseflight
Will this work on the multiwii 328p?