I'm not saying that the Drotek 10DOF is a bad sensor. I'm saying that there is something wrong with the code for those sensors.
Hi there
Just got my new Drotek 10DOF with the MPU6050
Soldered the SDA, SCL, 3V3 & GND. Didn't solder the pullups onboard nor I activated them in the code.
When I arm my quad and give throttle no matter if the sensors are activated or aren't activated my quadcopter starts spinning like a saw blade..
I use default PID settings. Yes I calibrated everything and I tried gyro only .. same effect.. and yes I use the lastest multiwii dev code
I've read some stuff about it.. but can't really find any solution. Did I solder something wrong ?
Thanks in advance
Drotek 10DOF MPU -> Saw blade
Re: Drotek 10DOF MPU -> Saw blade
Ok,
- what board are you using the Drotek with?
- have you made sure the drotek is mounted in the correct orientation
- do the sensors Gyro and Acc behave as expected in the GUI?
edit - you may also want to try giving it 5v
- what board are you using the Drotek with?
- have you made sure the drotek is mounted in the correct orientation
- do the sensors Gyro and Acc behave as expected in the GUI?
edit - you may also want to try giving it 5v
Re: Drotek 10DOF MPU -> Saw blade
- Flyduino Pro Mini 5V / 16 Mhz with the 3V3 regulator set on the warthox shield
- Orientation is fine
- Gyro & Acc behave like it should be in the GUI..
I just enabled the hardware pullups. Will test again, after that I'll power it on 5V.
Thanks for the help already!
- Orientation is fine
- Gyro & Acc behave like it should be in the GUI..
I just enabled the hardware pullups. Will test again, after that I'll power it on 5V.
Thanks for the help already!
Re: Drotek 10DOF MPU -> Saw blade
Hi,
I'm using the same 10DOF MPU based IMU from Drotek.
I can confirm that the sensor orientation setup is wrong on the Drotek homepage!!!!!
BUT, After some test, I figured out the right directions for def.h !!!
And now, in the latest dev code 20120528 the orientation is the same as for me. I couldn't test the code till now, but all the directions are the same so it should work.
That's why I'm always saying after any hardware modification, all functions should be tested carefully without motors but with GUI!!!!!!!!!!!!!
So download the latest dev and check the definition in def.h
BR
Adrian
I'm using the same 10DOF MPU based IMU from Drotek.
I can confirm that the sensor orientation setup is wrong on the Drotek homepage!!!!!
BUT, After some test, I figured out the right directions for def.h !!!
And now, in the latest dev code 20120528 the orientation is the same as for me. I couldn't test the code till now, but all the directions are the same so it should work.
That's why I'm always saying after any hardware modification, all functions should be tested carefully without motors but with GUI!!!!!!!!!!!!!
So download the latest dev and check the definition in def.h
BR
Adrian
Re: Drotek 10DOF MPU -> Saw blade
Okay I soldered the pullups but it didn't do anything at all. So I desoldered them.
Nhadrian.. I use the latest dev version and it doesn't work at all! What did you solder, and what did you connect? Did you edit PID levels? What did you enable / disable? Please give me some more information.
Edit: EVERYTHING WORKS IN THE GUI OK. BUT When I arm my quadcopter its starts wobbeling to death. I never had any vibrations issues with my previous sensors. Every thing on my quadcopter has rubber between & propellers are balanced.
2nd Edit: Been tweaking the PID levels. It's better but not flyable.. also PITCH & YAW is inverted.
Jesse
Nhadrian.. I use the latest dev version and it doesn't work at all! What did you solder, and what did you connect? Did you edit PID levels? What did you enable / disable? Please give me some more information.
Edit: EVERYTHING WORKS IN THE GUI OK. BUT When I arm my quadcopter its starts wobbeling to death. I never had any vibrations issues with my previous sensors. Every thing on my quadcopter has rubber between & propellers are balanced.
2nd Edit: Been tweaking the PID levels. It's better but not flyable.. also PITCH & YAW is inverted.
Jesse
Re: Drotek 10DOF MPU -> Saw blade
So we can confirm - nothing wrong with code or sensors but an individual config issue.
Check motor and props are balanced. Too much rubber and or foam tape on IMUs can actually proliferate vibrations through the frame.
Try using the LPF and moving average filters in config.h
Tune Acro first and get it as good as you can then trim and tune Level.
Check motor and props are balanced. Too much rubber and or foam tape on IMUs can actually proliferate vibrations through the frame.
Try using the LPF and moving average filters in config.h
Tune Acro first and get it as good as you can then trim and tune Level.
Re: Drotek 10DOF MPU -> Saw blade
Check out if Gyro Moveing Average is enabled or not?!
I just soldered on the four cables (GND, 3,3V, SDA, SCL) to my quadrino board, and it works great. I'm using the samePIDs as for fhe BMA/ITG combo on Quadrino previously.
But when Gyro Moveing Average is enabled, I even can't take off because of woddles!!!!!!!!
I just soldered on the four cables (GND, 3,3V, SDA, SCL) to my quadrino board, and it works great. I'm using the samePIDs as for fhe BMA/ITG combo on Quadrino previously.
But when Gyro Moveing Average is enabled, I even can't take off because of woddles!!!!!!!!
Re: Drotek 10DOF MPU -> Saw blade
Okay. Got it working somehow. I desoldered the PULLUPS thing so it should be activated because it works now.
Only problem that I have is.. Gyro only got some wobbles when flying. So I got to decrease my PID? But P, I or D? First time I'm doing PID..
Thanks in advance !
!
Only problem that I have is.. Gyro only got some wobbles when flying. So I got to decrease my PID? But P, I or D? First time I'm doing PID..
Thanks in advance
Re: Drotek 10DOF MPU -> Saw blade
Okay first LPF looks good..
I had some wobbles with standard PID with LPF on standard. Now I used this one and it seems to be gone:
#define MPU6050_LPF_188HZ
I had some wobbles with standard PID with LPF on standard. Now I used this one and it seems to be gone:
#define MPU6050_LPF_188HZ
Re: Drotek 10DOF MPU -> Saw blade
It's like scooby doo and the mystery machine in here some days
Re: Drotek 10DOF MPU -> Saw blade
Okay.. Gyro & Acc work but when enabling barometer it doesn't keep altitude but just starts spinning :/??
Re: Drotek 10DOF MPU -> Saw blade
Oh, I forgot to tell, I'm running MPU with 98 kHz LPF..... 
But I was running ITG with the same too.
But I was running ITG with the same too.
Re: Drotek 10DOF MPU -> Saw blade
188Hz works fine here Great we have the problem in common.
Magnetometer seem to work. Going outside & test it. Gyro + Acc +Magneto
Magnetometer seem to work. Going outside & test it. Gyro + Acc +Magneto
Re: Drotek 10DOF MPU -> Saw blade
Barometer seem to work now! Need to do a full scale test.
Magnetometer works BUT sometimes it just quits his job for a second.. Starts spinning around & after one second it's back again.. Scared the hell out of me :/
Here's an example.. it's just running and at random times this happened:
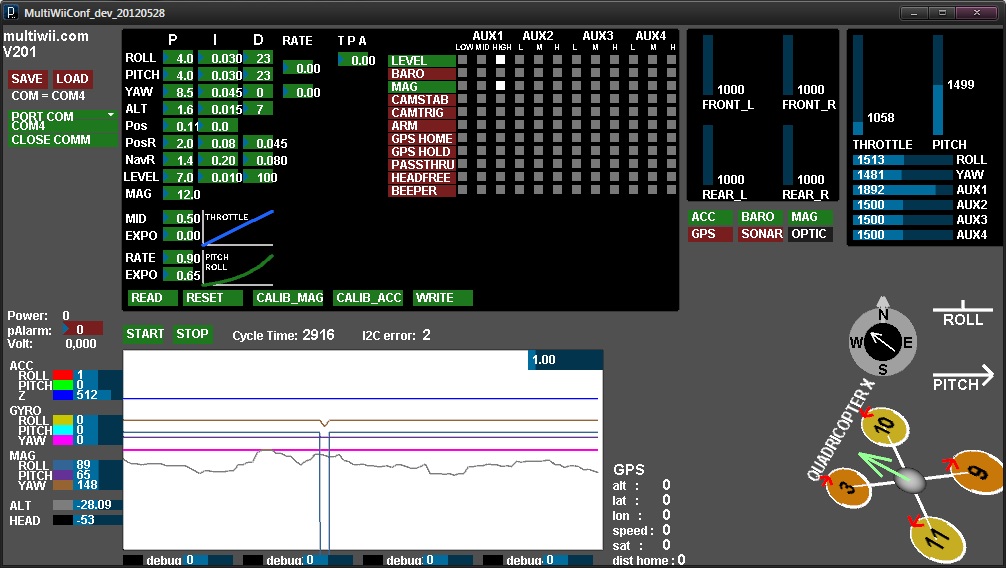
Magnetometer works BUT sometimes it just quits his job for a second.. Starts spinning around & after one second it's back again.. Scared the hell out of me :/
Here's an example.. it's just running and at random times this happened: