Airplane mode RTH
Re: Airplane mode RTH
Soooo when will Alex integrate this into shared  ...seems its stable, many positive user comments
...seems its stable, many positive user comments 
Re: Airplane mode RTH
I think It's ready to merge in to shared branch now.
I have found some issues with Failsafe if Gps fails while Passthru.
But It's same issue on normal V2.3
I will fix that first!
After that it's up to Alex if it's ok to GO.
The big issue is if I2C_GPS is used.
that it requires the modified I2C_GPS.
OSD Data from original I2C_GPS gives wrong OSD data witch FixedWing use for navigation.
If you use wrong I2C_GPS the plane will not navigate correct!
For Serial GPS there's no such problems.
I have found some issues with Failsafe if Gps fails while Passthru.
But It's same issue on normal V2.3
I will fix that first!
After that it's up to Alex if it's ok to GO.
The big issue is if I2C_GPS is used.
that it requires the modified I2C_GPS.
OSD Data from original I2C_GPS gives wrong OSD data witch FixedWing use for navigation.
If you use wrong I2C_GPS the plane will not navigate correct!
For Serial GPS there's no such problems.
-
fryefryefrye
- Posts: 57
- Joined: Thu Apr 11, 2013 7:19 am
Re: Airplane mode RTH
PatrikE wrote:I Packed all All tools and Modified Versions I Used For Dev.
Info in the Package.
FixedWingNav.rar
All major problems is fixed and It feels Stable now.
/Patrik
I want use this code to my plane. But there is a problem. So I switch back to Official 2.2 for my first fly.
Rudder is working OK in pass-through, But it will turn to one director slowly in other Mode. PWM from 1500 goto 1700 in about 10sec.
If the control stick of rudder moved and stop, the rudder will goto center and then move to 1700 in about 10sec.
All input values from gyro when the problem happen was 0.
Re: Airplane mode RTH
Set Yaw I to zero.
-
fryefryefrye
- Posts: 57
- Joined: Thu Apr 11, 2013 7:19 am
Re: Airplane mode RTH
PatrikE wrote:Set Yaw I to zero.
It's worked. Thank you.
I'm flying the MWC 2.2 on airplane with ANGLE mode today, It's so easy to fly.
I try to switch to GPSHome with MWC 2.2, the plane keep flying higher and higher, but it will turning around above my head, and will not goto far away. Any ideas about that ?
I will try your GPS function next time.
Do you know the BARO is working for airplane ? I want to use the Alt keep function for airplane.
Re: Airplane mode RTH
MWC 2.2 does NOT support RTH with Planes!
It will behave exactly as you describe.
You need to use FixedWingNav version for planes.
Is there other problems than I-Term when you use FixedWingNav ?
It will only control throttle but not Elevator.
It will behave exactly as you describe.
You need to use FixedWingNav version for planes.
Is there other problems than I-Term when you use FixedWingNav ?
Not in current version.Do you know the BARO is working for airplane ?
It will only control throttle but not Elevator.
-
fryefryefrye
- Posts: 57
- Joined: Thu Apr 11, 2013 7:19 am
Re: Airplane mode RTH
Sunday is over when I got your reply about "I-Term". So I'm fly with MWC2.2 on Sunday.
I have updated FixedWingNav in my plane and finish the ground test.
I will try GPSHOME next time.
Is the GPS_hold working in your FixedWingNav ? If it will work, what about the Altitude will work?
Re: Airplane mode RTH
GPS_hold works.
It will save the pos in 3D where it's enabled and repetedly return to the same point.
Altitude from GPS is used.
Should keep around +/- 2m.
It will save the pos in 3D where it's enabled and repetedly return to the same point.
Altitude from GPS is used.
Should keep around +/- 2m.
-
fryefryefrye
- Posts: 57
- Joined: Thu Apr 11, 2013 7:19 am
Re: Airplane mode RTH
PatrikE wrote:GPS_hold works.
It will save the pos in 3D where it's enabled and repetedly return to the same point.
Altitude from GPS is used.
Should keep around +/- 2m.
Thank you, hope I can have the fly in the weekend of the next week.
Re: Airplane mode RTH
Patrick,
I got that MPXV7002DP airspeed sensor working on analog input pin and reporting airspeed in the regular cm/s. Stored in gobal int airspeedSpeed.
Here is what I think I will be doing with NAV_Thro. All the rest of NAV code uses GPS_speed the way you programmed it.
Any thoughts? Is it going to break anything? Thanks!
I got that MPXV7002DP airspeed sensor working on analog input pin and reporting airspeed in the regular cm/s. Stored in gobal int airspeedSpeed.
Here is what I think I will be doing with NAV_Thro. All the rest of NAV code uses GPS_speed the way you programmed it.
Any thoughts? Is it going to break anything? Thanks!
Code: Select all
/*############### New FUNCTION ###############*/
// Force the Plane moving forward in headwind
#define AIR_MAXSPEED 3000 // Vne, ~108km/h. Airframe dependant.
#define AIR_NAVSPEED 1500 // Desired air speed in NAV mode ~54km/h
#define GPS_MINSPEED 500 // 500= ~18km/h
#define I_TERM 0.1f
int spDiff = 0;
int spAdd = 0;
if (GPS_speed < GPS_MINSPEED) { // check for too slow ground speed
spAdd += (GPS_MINSPEED - GPS_speed)*I_TERM; // increase nav air speed
} else {
spAdd -= spAdd*I_TERM; // decrease nav air speed
}
spAdd = constrain(spAdd, 0, AIR_MAXSPEED - AIR_NAVSPEED - 100);
if (airspeedSpeed < AIR_NAVSPEED - 100 + spAdd || airspeedSpeed > AIR_NAVSPEED + 100 + spAdd) { // maintain air speed between NAVSPEED and MAXSPEED
spDiff = (AIR_NAVSPEED + spAdd - airspeedSpeed)*I_TERM;
SpeedBoost += spDiff;
}
SpeedBoost = constrain(SpeedBoost,0,500);
NAV_Thro += SpeedBoost;
/*############################################*/
PatrikE wrote:Using ground speed can be really wrong with Head/Tailwind.
Current Code only use GPS speed to ensure the plane moves toward Home with a minimum 400cm/s (~12 km/h)
It should be possible to Change to TrueAirspeed instead of GPS speed.
But there should still be a check to make sure Plane is moving forward in strong Headwind.
-
fryefryefrye
- Posts: 57
- Joined: Thu Apr 11, 2013 7:19 am
Re: Airplane mode RTH
PatrikE wrote:Not in current version.Do you know the BARO is working for airplane ?
It will only control throttle but not Elevator.
Do you have plan to write some code on Alt_Keep?
I think the code is already in your FW_NAV code, just move some of then into BARO.
For people without Baro, the GPS alt also can be used. But it will need more code to add a flight mode, I think.
Re: Airplane mode RTH
Hi,
just found this yesterday, so i did not have the chance to go through this thread. I want to build a really small autopilot for one of my flying wings. Therefor i wanted the smallest possible controller. This one for example looks really nice:
.jpg)
But it does not have a baro. Do i need a baro for altitude or does the AP uses GPS altitude anyways? I guess the mag is not really needed, right?
just found this yesterday, so i did not have the chance to go through this thread. I want to build a really small autopilot for one of my flying wings. Therefor i wanted the smallest possible controller. This one for example looks really nice:
But it does not have a baro. Do i need a baro for altitude or does the AP uses GPS altitude anyways? I guess the mag is not really needed, right?
Re: Airplane mode RTH
Looks really nice!.
You don't need a Baro for Airplane.
Altitude from GPS is used.
MPU6050 + GPS is enough.
You don't need a Baro for Airplane.
Altitude from GPS is used.
MPU6050 + GPS is enough.
Re: Airplane mode RTH
PatrikE wrote:Looks really nice!.
You don't need a Baro for Airplane.
Altitude from GPS is used.
MPU6050 + GPS is enough.
Thanks mate. BTW this is nanowii from hobbyking if you dont know it already.

Re: Airplane mode RTH
Hi Patrick, I have yet to use it in a plane but have tested RTH for a copter from a couple of km and I'm glad to say it worked fine,
I noticed on the OSD a long time ago that the distance and speed were wrong, but only ever saw one other post about the speed
I have some code which fixes both the OSD speed and Distance added into my version of KVOSD. I took the distance out because needed the memory and I never seen anyone mention the issue. I guess not many go more than 650m on a copter!
I think I still have it - means do not have to upgrade the I2CGPS!
I can look to optimise the code and find space to add it back in... if it helps.
I noticed on the OSD a long time ago that the distance and speed were wrong, but only ever saw one other post about the speed
I have some code which fixes both the OSD speed and Distance added into my version of KVOSD. I took the distance out because needed the memory and I never seen anyone mention the issue. I guess not many go more than 650m on a copter!
I think I still have it - means do not have to upgrade the I2CGPS!
I can look to optimise the code and find space to add it back in... if it helps.
PatrikE wrote:The big issue is if I2C_GPS is used.
that it requires the modified I2C_GPS.
OSD Data from original I2C_GPS gives wrong OSD data witch FixedWing use for navigation.
If you use wrong I2C_GPS the plane will not navigate correct!
For Serial GPS there's no such problems.
-
felixrising
- Posts: 244
- Joined: Sat Mar 23, 2013 12:34 am
- Location: Australia
Re: Airplane mode RTH
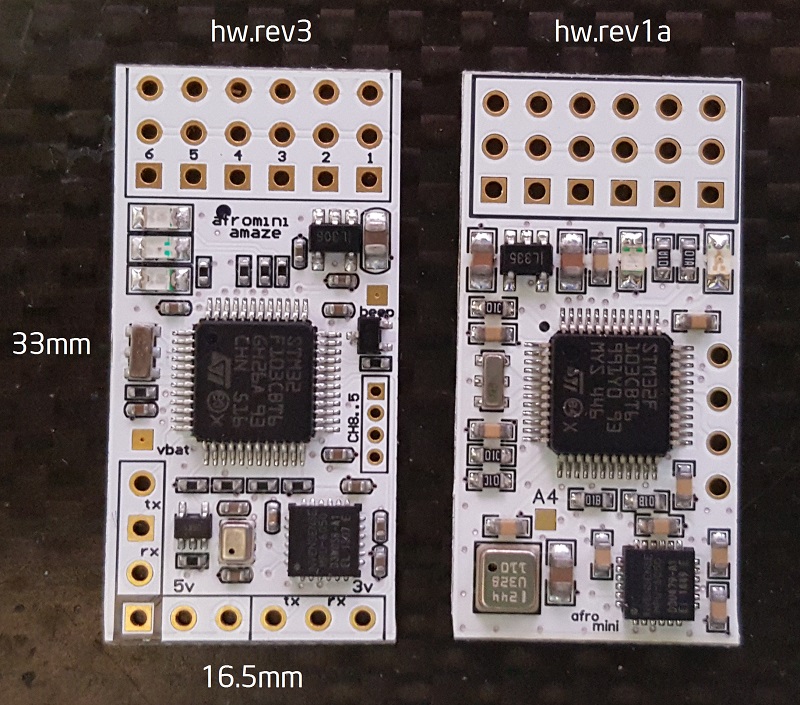
On topic but not arduino... Abusemark (timecop) has a very nice small FC called the AfroMini 32.. Similar price to the nanowii but much nicer from a formfactor + baro (yeah, not used, I know ) and lots of room (cpu, ram, flash) for features.. I've just stuck a acro naze32 on a flying wing which works great, baseflight supports aircraft but obviously hasn't got PatrikE contributions ported (yet)...
Rangarid wrote:PatrikE wrote:Looks really nice!.
You don't need a Baro for Airplane.
Altitude from GPS is used.
MPU6050 + GPS is enough.
Thanks mate. BTW this is nanowii from hobbyking if you dont know it already.
-
crashlander
- Posts: 506
- Joined: Thu May 05, 2011 8:13 am
- Location: Slovenia
Re: Airplane mode RTH
I'm also in process of sticking AfroMini32 on my FW.
On a plus side that board has 2 serial ports!
So lets hope the Patrik's code gets into mainline MWII and TC ports it to Baseflight (soon).
Regards
Andrej
On a plus side that board has 2 serial ports!
So lets hope the Patrik's code gets into mainline MWII and TC ports it to Baseflight (soon).
Regards
Andrej
Re: Airplane mode RTH
I Want a Afro32!....
To Bad it's sold out!..
Perfect fit in a narrow airframe.
I use a Mongoose-9DoF in my plane But the 328 is on the absolute limit of memory.
Besides it needs some soldering on the processor because PPM isn't pinnedout.
And a Mega gets too large in my plane.
To Bad it's sold out!..
Perfect fit in a narrow airframe.
I use a Mongoose-9DoF in my plane But the 328 is on the absolute limit of memory.
Besides it needs some soldering on the processor because PPM isn't pinnedout.
And a Mega gets too large in my plane.
Re: Airplane mode RTH
Hehe, i want one as well. Its only 18€...Hope they will be in stock again soon.
-
crashlander
- Posts: 506
- Joined: Thu May 05, 2011 8:13 am
- Location: Slovenia
Re: Airplane mode RTH
PatrikE wrote:I Want a Afro32!....
Yep it is the sexy-est FC I have ever seen.
The bottom TX RX pads are probably not 5V tolerant (from checking the CPU data sheet and TC's code) but since most of UBLOX GPS's have internal Vreg and operate on 3.3V that is not problematic (at least mine gives 3.3V TX and RX when connected to 5V VCC).
Regards
Andrej
-
felixrising
- Posts: 244
- Joined: Sat Mar 23, 2013 12:34 am
- Location: Australia
Re: Airplane mode RTH
Hi, yeaht/c needs to get cooking.. he knows there are a few people wanting them but is busy with other paid work and cooking up normal naze32.. but don't let that stop you from hassling him in #multiwii channel.
I think those bottom pads are 5v tolerant ... they are normally used for pin 4/5 RC input and gps on the full naze... which I have no issues using with UBLOX GPS etc..
I think those bottom pads are 5v tolerant ... they are normally used for pin 4/5 RC input and gps on the full naze... which I have no issues using with UBLOX GPS etc..
Re: Airplane mode RTH
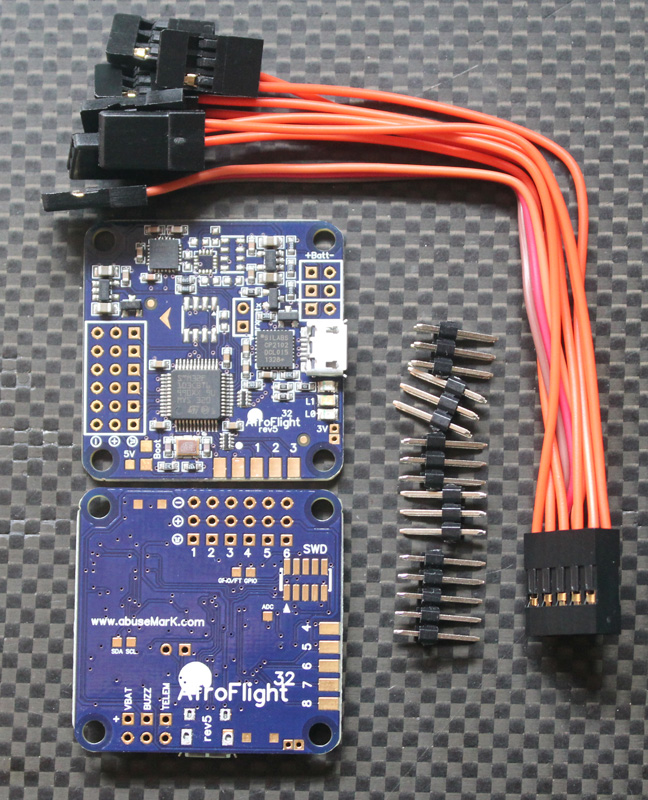
How about this board
http://witespyquad.gostorego.com/the-flip32-249.html
http://witespyquad.gostorego.com/the-flip32-249.html
Re: Airplane mode RTH
Acronaze32 from Timecop would make a similairly good platform like the afromini.. Its small at 36*36mm, cheap as its same price as afromini.. And its in stock: http://abusemark.com/store/index.php?ma ... ucts_id=38
Last edited by msev on Thu Mar 06, 2014 2:14 pm, edited 1 time in total.
Re: Airplane mode RTH
Flip32 has some serious problems. Esc pins wired wrong, non functional dsm port.
Afromini is really small + light + comes with baro. No onboard usb port.
Afromini is really small + light + comes with baro. No onboard usb port.
Re: Airplane mode RTH
aydineser wrote:How about this board
http://witespyquad.gostorego.com/the-flip32-249.html
Since TimeCop does make board which he open the HW, we can't really call this board a clone.
In the open software and open hardware the "clone" factor is part of the game
Personally I would have made a better link to the HW creator of the board, with a link from witespyquad to www.abusemark.com ... for clearly state the paternity of the board.
Or they could have made a royalties payment to TimeCop
But yes, it is not really mandatory for ethical business point of view the two points above.
Anyhow, we all know that these boards are designed and supported by timecop, his prices are not high at all, and shipping from Japan is ultra fast and reliable.
So, why not take a board from the creator of it ?
If you want a cheap Naze32 ... you can take a 10DOF from eBay, and take from TimeCop the nice STM32 micro development board ... just connect these two board via i2c, and you have all you need for control a copter or airplane.
Re: Airplane mode RTH
Is RTH already incorporated to MultiWii 2.3 or the only working versions are the ones posted here?
TIA
TIA
-
felixrising
- Posts: 244
- Joined: Sat Mar 23, 2013 12:34 am
- Location: Australia
Re: Airplane mode RTH
It hasn't been picked up by Alexinparis yet... this thread is in ideas section, so probably PatrikE needs to poke Alex or Hamburger about it...
Re: Airplane mode RTH
Hello guys,
i would like to setup a Crius SE with Multiwii airplane on a flying wing.
Patrik - after reading around in the thread - thats a great help! thank you.
so in order to get my Crius SE board to run on my flying wing im using your DEV version and doing the following:
Multiwii:
1. define flying wing.
2. define Crius SE board.
3. define i2c_gps.
i2c_gps: flash your 2_2 version (as its eeprom backed up with a battery on my Ublox Neo6M)
MinimOSD: flash your KV version.
The above setup sould be able tp perform GPS hold (does it circle around the spot?) and RTH ?
Also what does it do in RTH? just fly back home in a steady altitude or... ?
Did i miss anything?
BTW which Ublox configuration file does this work with?
i would like to setup a Crius SE with Multiwii airplane on a flying wing.
PatrikE wrote:I Packed all All tools and Modified Versions I Used For Dev.
Info in the Package.
FixedWingNav.rar
All major problems is fixed and It feels Stable now.
/Patrik
Patrik - after reading around in the thread - thats a great help! thank you.
so in order to get my Crius SE board to run on my flying wing im using your DEV version and doing the following:
Multiwii:
1. define flying wing.
2. define Crius SE board.
3. define i2c_gps.
i2c_gps: flash your 2_2 version (as its eeprom backed up with a battery on my Ublox Neo6M)
MinimOSD: flash your KV version.
The above setup sould be able tp perform GPS hold (does it circle around the spot?) and RTH ?
Also what does it do in RTH? just fly back home in a steady altitude or... ?
Did i miss anything?
BTW which Ublox configuration file does this work with?
Re: Airplane mode RTH
Patrik,
I have actually found the TXT file and read it - and configured everything but i can not get my Ublox GPS to speak to the i2c_gps patched version.
in voth 2.1 and 2.2 of i2c_gps patched, i defined Ublox 115200 and loaded the Ublox config file in your folder (which defines Ublox protocol and 115200) but once the module flashes a locked GPS signel, the i2c_gps adapter is still flashing a red light slowly (i believe it should be blinking 3 times like in my Multiwii Quad).
Can you offer some assistance in getting a Ublox Neo6M to speak to the i2c_gps patched version?
Here is how i defined V2.2 of i2c_gps patched:
//////////////////////////////////////////////////////////////////////////////
// i2C comm definitions
//
#define I2C_ADDRESS 0x20 //7 bit address 0x40 write, 0x41 read
/* GPS Lead filter - predicts gps position based on the x/y speed. helps overcome the gps lag. */
#define GPS_LEAD_FILTER
// Special Mode for use with FixedWing
//
#define FIXEDWING // Patches for Navigation on Fixedwing.
#define I2CPATCH //Corrects OSD data and Navigation on Fixedwing.
/* Serial speed of the GPS */
#define GPS_SERIAL_SPEED 115200
//#define GPS_SERIAL_SPEED 38400
/* GPS protocol
* NMEA - Standard NMEA protocol GGA, GSA and RMC sentences are needed
* UBLOX - U-Blox binary protocol, use the ublox config file (u-blox-config.ublox.txt) from the source tree
* MTK_BINARY16 - MTK binary protocol (DIYDrones v1.6)
* MTK_BINARY19 - MTK binary protocol (DIYDrones v1.9)
* MTK_INIT - Initialize MTK GPS (if MTK_BINARY16 or 19 is not defined then it goes to NMEA, otherwise it goes for binary)
* With MTK and UBLOX you don't have to use GPS_FILTERING in multiwii code !!!
*
*/
//#define NMEA
#define UBLOX
//#define MTK_BINARY16
//#define MTK_BINARY19
//#define INIT_MTK_GPS
//////////////////////////////////////////////////////////////////////////////
// Sonar support. Based on code mods from Crazy Al
// Connect Sonar trigger to PC3 (arduino pin A3) and echo output to PC2 (arduino pin A2)
// Supported sonars :
// Ping/Pong type sonar modules such as HC-SR04, SRF-04, DYP-ME007 and many others...
// PWM output continous sonars such as the MAXBOTIX series (connect pin2(PWM out) of the sonar to PC2
//#define SONAR // USE Sonar
//Sonar type uncomment only one at a time
//#define PINGPONG
#define MAXBOTIX_PWM // PWM output mode sonar
I have actually found the TXT file and read it - and configured everything but i can not get my Ublox GPS to speak to the i2c_gps patched version.
in voth 2.1 and 2.2 of i2c_gps patched, i defined Ublox 115200 and loaded the Ublox config file in your folder (which defines Ublox protocol and 115200) but once the module flashes a locked GPS signel, the i2c_gps adapter is still flashing a red light slowly (i believe it should be blinking 3 times like in my Multiwii Quad).
Can you offer some assistance in getting a Ublox Neo6M to speak to the i2c_gps patched version?
Here is how i defined V2.2 of i2c_gps patched:
//////////////////////////////////////////////////////////////////////////////
// i2C comm definitions
//
#define I2C_ADDRESS 0x20 //7 bit address 0x40 write, 0x41 read
/* GPS Lead filter - predicts gps position based on the x/y speed. helps overcome the gps lag. */
#define GPS_LEAD_FILTER
// Special Mode for use with FixedWing
//
#define FIXEDWING // Patches for Navigation on Fixedwing.
#define I2CPATCH //Corrects OSD data and Navigation on Fixedwing.
/* Serial speed of the GPS */
#define GPS_SERIAL_SPEED 115200
//#define GPS_SERIAL_SPEED 38400
/* GPS protocol
* NMEA - Standard NMEA protocol GGA, GSA and RMC sentences are needed
* UBLOX - U-Blox binary protocol, use the ublox config file (u-blox-config.ublox.txt) from the source tree
* MTK_BINARY16 - MTK binary protocol (DIYDrones v1.6)
* MTK_BINARY19 - MTK binary protocol (DIYDrones v1.9)
* MTK_INIT - Initialize MTK GPS (if MTK_BINARY16 or 19 is not defined then it goes to NMEA, otherwise it goes for binary)
* With MTK and UBLOX you don't have to use GPS_FILTERING in multiwii code !!!
*
*/
//#define NMEA
#define UBLOX
//#define MTK_BINARY16
//#define MTK_BINARY19
//#define INIT_MTK_GPS
//////////////////////////////////////////////////////////////////////////////
// Sonar support. Based on code mods from Crazy Al
// Connect Sonar trigger to PC3 (arduino pin A3) and echo output to PC2 (arduino pin A2)
// Supported sonars :
// Ping/Pong type sonar modules such as HC-SR04, SRF-04, DYP-ME007 and many others...
// PWM output continous sonars such as the MAXBOTIX series (connect pin2(PWM out) of the sonar to PC2
//#define SONAR // USE Sonar
//Sonar type uncomment only one at a time
//#define PINGPONG
#define MAXBOTIX_PWM // PWM output mode sonar
-
felixrising
- Posts: 244
- Joined: Sat Mar 23, 2013 12:34 am
- Location: Australia
Re: Airplane mode RTH
BTW.. those Afromini 32's are fresh out of the oven and back in stock. I just picked up a couple.
Re: Airplane mode RTH
@i3dm
Sorry i don't have any experience of Ublox.
I only use NMEA Gps.
Non of my patches should effect it.
It just changes some calculations.
Sorry i don't have any experience of Ublox.
I only use NMEA Gps.
Non of my patches should effect it.
It just changes some calculations.
Re: Airplane mode RTH
PatrikE wrote:@i3dm
Sorry i don't have any experience of Ublox.
I only use NMEA Gps.
Non of my patches should effect it.
It just changes some calculations.
thats interesting - as it works perfectly well with the I2C_GPS versions i have on my Quads.
This is what i currently use (i chose V2 in the post) and works well:
http://www.rcgroups.com/forums/showthread.php?t=1724694
perhaps you could have a look and see if its any different than yours?
BTW i can configure my Ublox for NMEA as well, but read in several places that Ublox is more accurate - honestly for a plane it shouldnt matter as much as for a Multi.
perhaps you could share your actual file for the I2C_GPS board + GPSS settings (NMEA, buad rate etc?) and i will configure my Ublox accordingly and retry.
Re: Airplane mode RTH
The config in the I2C Patch is configured for my setup!
10hz @ 115200 NMEA
I'll check if there's any difference.
10hz @ 115200 NMEA
I'll check if there's any difference.
Re: Airplane mode RTH
PatrikE wrote:I'll check if there's any difference.
Thank you - that will be most helpful
BTW which calculations did you change in your patch?
can i use the stock I2C_GPS with your airplane setup?
Re: Airplane mode RTH
Not recommended!i3dm wrote:can i use the stock I2C_GPS with your airplane setup?
You can find the changes if you search in I2C_GPS_NAV.ino for
#define FIXEDWING // Patches for Navigation on Fixedwing.
#define I2CPATCH //Corrects OSD data and Navigation on Fixedwing.
I patched the file you linked to.
https://dl.dropboxusercontent.com/u/975 ... _Mod_x.rar
Compiles But Not tested but.
Test if it works with you Ublox.
Re: Airplane mode RTH
PatrikE wrote:Not recommended!i3dm wrote:can i use the stock I2C_GPS with your airplane setup?
I patched the file you linked to.
https://dl.dropboxusercontent.com/u/975 ... _Mod_x.rar
Compiles But Not tested but.
Test if it works with you Ublox.
Wow that was quick - thank you!
I will test tonight once im in ront of my desk. is it any different than your original version?
BTW - what calcs are you changing?
Last edited by i3dm on Sun Mar 09, 2014 1:55 pm, edited 1 time in total.
Re: Airplane mode RTH
You can find the changes if you search in I2C_GPS_NAV.ino for
#define FIXEDWING // Patches for Navigation on Fixedwing.
#define I2CPATCH //Corrects OSD data and Navigation on Fixedwing.
#define FIXEDWING // Patches for Navigation on Fixedwing.
#define I2CPATCH //Corrects OSD data and Navigation on Fixedwing.
Re: Airplane mode RTH
PatrikE wrote:You can find the changes if you search in I2C_GPS_NAV.ino for
#define FIXEDWING // Patches for Navigation on Fixedwing.
#define I2CPATCH //Corrects OSD data and Navigation on Fixedwing.
is the original file i used any different than yours was originally (before patches)?
Re: Airplane mode RTH
Not much but some NEO 6 stuff is added/changed in your files.
Re: Airplane mode RTH
PatrikE wrote:Not much but some NEO 6 stuff is added/changed in your files.
Crossing fingers thats the ticket to get it to work then
Oh, and how does your version perform RTH? simply turn home and fly in a straight line on steady altitude? and then circling home or..? i didnt fimd this info anywhere.
Re: Airplane mode RTH
Short answer YES!How does your version perform RTH? simply turn home and fly in a straight line on steady altitude? and then circling home or..?
Long answer...
When RTH is activated.
#1
Start Climb to >20 m
#2
Begin Navigating while Climbing to RTH Alt.
#3
Navigate to home maintaining altitude.
#4
After Home is reached.
Keep RTH Altitude and return to home Pos after Passing it.(Hold Pos)
If RTH is activated Higher than programmed it will keep the current Alt
and start Descend when home is reached 1:st time.
GPS HOLD sets a 3D WP that it will go for repeatedly!
Re: Airplane mode RTH
PatrikE wrote:Short answer YES!How does your version perform RTH? simply turn home and fly in a straight line on steady altitude? and then circling home or..?
Long answer...
When RTH is activated.#1
Start Climb to >20 m
#2
Begin Navigating while Climbing to RTH Alt.
#3
Navigate to home maintaining altitude.
#4
After Home is reached.
Keep RTH Altitude and return to home Pos after Passing it.(Hold Pos)
If RTH is activated Higher than programmed it will keep the current Alt
and start Descend when home is reached 1:st time.
GPS HOLD sets a 3D WP that it will go for repeatedly!
does it control the throttle to change altitude?
also where to i set RTH alt?
thanks again for all your help.
Re: Airplane mode RTH
Read GpsPlane setup.txt
Default value is set to 50m.
Throttle is controlled by Navigation,
Alterror + Climbangle.
And also if groundspeed is < 5m/s during navigation.
POSR_D => Set RTH altitude 0.250 = 250 meter over home pos
Default value is set to 50m.
Throttle is controlled by Navigation,
Alterror + Climbangle.
And also if groundspeed is < 5m/s during navigation.
Re: Airplane mode RTH
PatrikE wrote:Not much but some NEO 6 stuff is added/changed in your files.
im a bit emberrassed.. hehe
actually both files seem to work now - perhaps the sattelite reception was borderline yesterday, the Ublox module showed a 3d lock (3 sats+) and the adapter didnt show it, but now with 6 sats both files seem to flash the red LED on the i2c_gps 3 times indicating a lock.
Re: Airplane mode RTH
PatrikE,
any videos of your flight testing with your Multiwii airplane RTH version?
any videos of your flight testing with your Multiwii airplane RTH version?

AW: Airplane mode RTH
Hi,
maybe I can take a video tomorrow, yesterday my KeyCam was empty on RTH...
Best Regards from Germany!
Chriss
maybe I can take a video tomorrow, yesterday my KeyCam was empty on RTH...
Best Regards from Germany!
Chriss
Re: Airplane mode RTH
Testflight i did almost one year ago.
http://youtu.be/tgVza2NYfb4
A lot of things have been improved since then.
A video someone posted on Youtube
http://youtu.be/ZONx-R0EHd0
And a video from RBirdie001
http://youtu.be/n7FW4q12tU0
http://youtu.be/tgVza2NYfb4
A lot of things have been improved since then.
A video someone posted on Youtube
http://youtu.be/ZONx-R0EHd0
And a video from RBirdie001
http://youtu.be/n7FW4q12tU0
Re: Airplane mode RTH
@PatrikE
Just a noob question , is your code available on Naze32 ?
Just a noob question , is your code available on Naze32 ?
Re: Airplane mode RTH
So i have Multiwii Airplane installed in my flying wing and i have a few questions:
Edit: got most of it working.
one question though - what happens when i have to trim my plane in pass through mode? when flying in HORIZON for example the board will think i want to turn as the trims are off center,
thank you.
Edit: got most of it working.
one question though - what happens when i have to trim my plane in pass through mode? when flying in HORIZON for example the board will think i want to turn as the trims are off center,
thank you.
Re: Airplane mode RTH
hinkel wrote:@PatrikE
Just a noob question , is your code available on Naze32 ?
Not yet.
You have to use Arduino.