Naze32 hardware discussion thread
-
crazylittle
- Posts: 15
- Joined: Mon Jun 25, 2012 1:27 am
Re: Naze32 hardware discussion thread
Yeah, I haven't updated that ever since the CLI precluded a need to change any header definitions for basic stuff like tri-servo-direction.
Re: Naze32 hardware discussion thread
Here's my latest quad with a Naze32 FC and SK F-30a ESCs. Flys pretty good now that I've learned how to fly without it getting away from me and crashing:
https://vimeo.com/61347699
https://vimeo.com/61347699
Re: Naze32 hardware discussion thread
ok i played a little bit with the code, i can change servo for gimbal but i don't know how to use 3 pwm output for servo.
Now i can use only pwmwriteservo(0.. and pwmwriteservo(1.. I try to use pwmwriteservo(2.. but it won't found becouse i think it's used for motors.
Any way to enable 3 servo output on the board?
sorry again, i don't wont to annoying
thanks
Now i can use only pwmwriteservo(0.. and pwmwriteservo(1.. I try to use pwmwriteservo(2.. but it won't found becouse i think it's used for motors.
Any way to enable 3 servo output on the board?
sorry again, i don't wont to annoying
thanks
Re: Naze32 hardware discussion thread
You need to decide which PWM group to assign your servo stuff (you will probably need to use PPM input to free up more servo outputs) and modify one of the PWM maps in the driver to match your pinout.
This should have been very obvious from reading the sources, so I'm not sure why you had to ask.
look at drv_pwm and how it initializes.
This should have been very obvious from reading the sources, so I'm not sure why you had to ask.
look at drv_pwm and how it initializes.
-
crazylittle
- Posts: 15
- Joined: Mon Jun 25, 2012 1:27 am
Re: Naze32 hardware discussion thread
crazylittle wrote:Yeah, I haven't updated that ever since the CLI precluded a need to change any header definitions for basic stuff like tri-servo-direction.
Well I just confirmed that it does compile still, but the resulting hex file won't flash properly. It ends up much larger than 64k.
Re: Naze32 hardware discussion thread
Just change linker scripts for 128K devices.
All 64K devices have 128k anyway.
All 64K devices have 128k anyway.
-
crazylittle
- Posts: 15
- Joined: Mon Jun 25, 2012 1:27 am
Re: Naze32 hardware discussion thread
timecop wrote:Just change linker scripts for 128K devices.
All 64K devices have 128k anyway.
que pasa?
Re: Naze32 hardware discussion thread
Answered on IRC.
64K F103C8 devices still have 128K of flash, only their flashsize reigster reports 64K.
But you can write to, and read from, the upper 64k. For example. I store baseflight settings at the top of 128k (last 8kbyte page) since beginning on both 64k and 128k devices.
64K F103C8 devices still have 128K of flash, only their flashsize reigster reports 64K.
But you can write to, and read from, the upper 64k. For example. I store baseflight settings at the top of 128k (last 8kbyte page) since beginning on both 64k and 128k devices.
-
crazylittle
- Posts: 15
- Joined: Mon Jun 25, 2012 1:27 am
Re: Naze32 hardware discussion thread
Heh, that worked. Flashing 128k works with the codesourcery compiled hex. So yeah, follow the code sourcery instructions, and when you run the STM Flash tool, pick "STM32_Med-density_128K" and flash. It'll work. My hex came out to 71k
-
irun4fundotca
- Posts: 21
- Joined: Wed Jan 02, 2013 9:58 pm
- Location: Sydenham, Ontario,Canada
- Contact:
Re: Naze32 hardware discussion thread
hey timecop i found this today, think something could be ported to it with an onscreen calibration interface or diagnostics
http://www.aliexpress.com/item/Free-shi ... 23772.html
I know its large but for those big multirotors be kinda neat
some photos
http://img03.taobaocdn.com/imgextra/i3/31032630/T2U7JqXklXXXXXXXXX_!!31032630.jpg
http://img04.taobaocdn.com/imgextra/i4/31032630/T2XApqXodaXXXXXXXX_!!31032630.jpg
http://www.aliexpress.com/item/Free-shi ... 23772.html
I know its large but for those big multirotors be kinda neat
some photos
http://img03.taobaocdn.com/imgextra/i3/31032630/T2U7JqXklXXXXXXXXX_!!31032630.jpg
{kind=link}
http://img04.taobaocdn.com/imgextra/i4/31032630/T2XApqXodaXXXXXXXX_!!31032630.jpg
{kind=link}
Re: Naze32 hardware discussion thread
Stuff like that has been available for years.
Go ahead.
Go ahead.
Re: Naze32 hardware discussion thread
irun4fundotca wrote:hey timecop i found this today, think something could be ported to it with an onscreen calibration interface or diagnostics
http://www.aliexpress.com/item/Free-shi ... 23772.html
I know its large but for those big multirotors be kinda neat
some photos
http://img03.taobaocdn.com/imgextra/i3/3102630/T2U7JqXklXXXXXXXX_!!31032630.jpg
http://img04.taobaocdn.com/imgextra/i4/3102630/T2XApqXodaXXXXXXX_!!31032630.jpg
{kind=link}
{kind=link}
Too many things to go wrong for my liking of aircraft...unless you meant as a separate module for ground programming?
So what up with the tracking pics anyway???
Re: Naze32 hardware discussion thread
irun4fundotca wrote:hey timecop i found this today, think something could be ported to it with an onscreen calibration interface or diagnostics
http://www.aliexpress.com/item/Free-shi ... 23772.html
....
what do you have against a 7" ANDROID
Re: Naze32 hardware discussion thread
Hi.
I have a Hexa with a 2axis gimbal.
I use PPM rx Fasst 8ch.
When i stepped up from Quad to Hexa i lost 2 ch to the motor's.
Does it have to be like this, or is there a way to free up ch 5-6 ?
At the moment i have the servo's on two knobs for roll and tilt.
I dont need both roll and tilt on separat ch, maby only tilt ?!
Noob question, i know
I have a Hexa with a 2axis gimbal.
I use PPM rx Fasst 8ch.
When i stepped up from Quad to Hexa i lost 2 ch to the motor's.
Does it have to be like this, or is there a way to free up ch 5-6 ?
At the moment i have the servo's on two knobs for roll and tilt.
I dont need both roll and tilt on separat ch, maby only tilt ?!
Noob question, i know
Re: Naze32 hardware discussion thread
Pretty sure if you use PPM + camstab gimbal servos stay on 1/2 and then motors to 3,4,5,6 and then the other 2 go on the RC input header? The manual covers this.
Re: Naze32 hardware discussion thread
timecop wrote:Pretty sure if you use PPM + camstab gimbal servos stay on 1/2 and then motors to 3,4,5,6 and then the other 2 go on the RC input header? The manual covers this.
I got all that right, but was hoping that it could be a way to free 1 rc channel
and keep the servo signal on the Naze32 ?
Maby i'm just talking nonsens ?
Re: Naze32 hardware discussion thread
Pretty sure you are.
I don't see what the big deal is with hooking up motor to the side header.
If you wanna screw around with the code you can certainly move gimbal servos to RC connector and use all 6 motor pins for,, well,, motors, but thats up for you to do.
I don't see what the big deal is with hooking up motor to the side header.
If you wanna screw around with the code you can certainly move gimbal servos to RC connector and use all 6 motor pins for,, well,, motors, but thats up for you to do.
-
irun4fundotca
- Posts: 21
- Joined: Wed Jan 02, 2013 9:58 pm
- Location: Sydenham, Ontario,Canada
- Contact:
Re: Naze32 hardware discussion thread
I finally got a hold of a ppm/uart receiver, to try and take advantage of more inputs like gps and connect using one wire
im kinda lost tho I set my channel mappings (cli) to match the listed order or my orange/lemon rx A21ETR34
heres what the receiver says its outputs are:
- TX port (UART, 9600bps, 8N1)
Condition 1) UART output specification when no signal received (device reset and continuously monitor for valid signal every 0.5 sec):
- <0x13><'R'><'E'><'S'><'E'><'T'><0x13>
- <0x13> is used as header for beginning and ending identifier
Condition 2) UART output specification when signal is received ( updated ~40ms with 8 bytes of information):
- <0x13><Aileron><AUX><Gear> Elevator><Throttle><Rudder><0x13>
- DEC(66) ~ DEC(134) refer to the approximate value for each of the full range control output for the 6 channels.
- <0x13> is used as header for beginning and ending identifier
For example: if all channels are centered except throttle shutdown and AUX is maximized, the UART should output the following.
<0x13><DEC(100)> <DEC(134)> <DEC(100)> <DEC(100)> <DEC(66)> <DEC(100)><0x13>
- PPM port
Condition 1) PPM pulled to ground (logic level low).
Condition 2) If signal is valid, 6 high pulses are used to represent Aileron, AUX, Gear, Elevator, Throttle and Rudder while each signal is separated by ~60us low pulse. ~40ms low pulse followed and continues the updates from receiver.
With the way i have it, the only channel that moves on the realtime monitor is channel 1 (rudder stick on radio)
im kinda lost tho I set my channel mappings (cli) to match the listed order or my orange/lemon rx A21ETR34
heres what the receiver says its outputs are:
- TX port (UART, 9600bps, 8N1)
Condition 1) UART output specification when no signal received (device reset and continuously monitor for valid signal every 0.5 sec):
- <0x13><'R'><'E'><'S'><'E'><'T'><0x13>
- <0x13> is used as header for beginning and ending identifier
Condition 2) UART output specification when signal is received ( updated ~40ms with 8 bytes of information):
- <0x13><Aileron><AUX><Gear> Elevator><Throttle><Rudder><0x13>
- DEC(66) ~ DEC(134) refer to the approximate value for each of the full range control output for the 6 channels.
- <0x13> is used as header for beginning and ending identifier
For example: if all channels are centered except throttle shutdown and AUX is maximized, the UART should output the following.
<0x13><DEC(100)> <DEC(134)> <DEC(100)> <DEC(100)> <DEC(66)> <DEC(100)><0x13>
- PPM port
Condition 1) PPM pulled to ground (logic level low).
Condition 2) If signal is valid, 6 high pulses are used to represent Aileron, AUX, Gear, Elevator, Throttle and Rudder while each signal is separated by ~60us low pulse. ~40ms low pulse followed and continues the updates from receiver.
With the way i have it, the only channel that moves on the realtime monitor is channel 1 (rudder stick on radio)
Last edited by irun4fundotca on Fri Mar 15, 2013 1:27 am, edited 1 time in total.
Re: Naze32 hardware discussion thread
I have *no* freaking idea what that is.
This is what PPM/CPPM is: http://www.frsky-rc.com/uploadfile/2011 ... 952865.jpg
p.s. GPS works with regular receiver. Just those 2 channels are skipped, you still have 6 inputs (4 RC + 2 AUX)
No need to remap anything, either. so if your mapping is AETR1234 it just becomes AETR12
This is what PPM/CPPM is: http://www.frsky-rc.com/uploadfile/2011 ... 952865.jpg
{kind=link}
p.s. GPS works with regular receiver. Just those 2 channels are skipped, you still have 6 inputs (4 RC + 2 AUX)
No need to remap anything, either. so if your mapping is AETR1234 it just becomes AETR12
-
irun4fundotca
- Posts: 21
- Joined: Wed Jan 02, 2013 9:58 pm
- Location: Sydenham, Ontario,Canada
- Contact:
Re: Naze32 hardware discussion thread
Ok so wouldnt i map it from the receiver in the order like this states above
"Aileron, AUX, Gear, Elevator, Throttle and Rudder" or do i stick with the spektrum order TAER1234
if i had another radio system like a 9x i would go that route, but im kinda stuck using this receiver with ppm output
or i have to use a signal wire for each channel ,am i correct in understanding that by using one for each i lose the ch3/4 as an input
"Aileron, AUX, Gear, Elevator, Throttle and Rudder" or do i stick with the spektrum order TAER1234
if i had another radio system like a 9x i would go that route, but im kinda stuck using this receiver with ppm output
or i have to use a signal wire for each channel ,am i correct in understanding that by using one for each i lose the ch3/4 as an input
Re: Naze32 hardware discussion thread
I don't know. You described some UART protocol that I never heard of.
PPM is what I linked on the image above in any channel order.
Also, you obviously need to enable feature PPM for this to work.
PPM is what I linked on the image above in any channel order.
Also, you obviously need to enable feature PPM for this to work.
-
irun4fundotca
- Posts: 21
- Joined: Wed Jan 02, 2013 9:58 pm
- Location: Sydenham, Ontario,Canada
- Contact:
Re: Naze32 hardware discussion thread
yes i had ppm enabled and gps
no its working!! (not ppm tho.. using a million wires):) it was the receiver
I think I just need to get another radio system soon spektrum blows!
BTW hes a link to the receivers page
http://www.lemon-rx.com/shop/index.php? ... duct_id=66
no its working!! (not ppm tho.. using a million wires):) it was the receiver
I think I just need to get another radio system soon spektrum blows!
BTW hes a link to the receivers page
http://www.lemon-rx.com/shop/index.php? ... duct_id=66
Re: Naze32 hardware discussion thread

what is this element, i managed to tear it off :/
Re: Naze32 hardware discussion thread
voltage reg, something like http://www.ti.com/product/lp2992 is compatible and should be available anywhere.
Re: Naze32 hardware discussion thread
On a quad-x config with gimbal control enabled, will this control a "Super Simple Gimbal"?
http://www.rcgroups.com/forums/showthread.php?t=1793759&page=2
I believe it needs differential mixing?
I'm planning on using a self controlled, brush less gimbal soon....
But for now, trying to "cobble" something together to be able to shoot a video that my work is requesting......
http://www.rcgroups.com/forums/showthread.php?t=1793759&page=2
I believe it needs differential mixing?
I'm planning on using a self controlled, brush less gimbal soon....
But for now, trying to "cobble" something together to be able to shoot a video that my work is requesting......
Re: Naze32 hardware discussion thread
Set gimbal_flags = 16 should get you close
Edit. Thanks ablomas for correction.
Edit. Thanks ablomas for correction.
Re: Naze32 hardware discussion thread
jef79m wrote:Set gimbal_flags = 16 should get you close
Edit. Thanks ablomas for correction.
hmm.... Seems to pitch correctly.... Roll seems like it's reversed. How does this setting work? Can't seem to find much reference....
Thanks for the start.... i'm close on this, should be a nice improvement to my video.
Re: Naze32 hardware discussion thread
I believe set pitch/roll gimbal gains can be inverted (i.e -xxx for value) to swap directions.
Re: Naze32 hardware discussion thread
@ timecop;
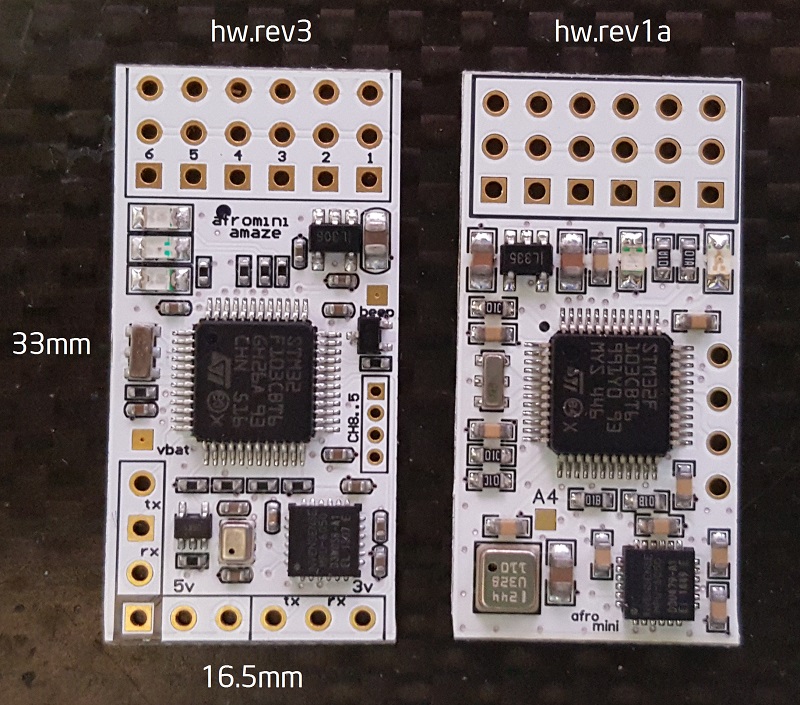
AfroMini32
 =
= 
 http://abusemark.com/store/index.php?ma ... ucts_id=45
http://abusemark.com/store/index.php?ma ... ucts_id=45
you only had 3 pieces made

AfroMini32
= you only had 3 pieces made
Re: Naze32 hardware discussion thread
I was gonna make 4 more but then other shit happened.
So maybe next week. wtf do people use these for anyway?
So maybe next week. wtf do people use these for anyway?
Re: Naze32 hardware discussion thread
jef79m wrote:Set gimbal_flags = 16 should get you close
Edit. Thanks ablomas for correction.
This is just about right..... When i turn on just camstab, it works well. When I arm, one servo rolls hard, so the camera platform is tilted back, stab still works, just skewed bad. If i move the servo arm to zero, things work fine til i disarm..... then the cam rolls the opposite way back from level again........
Any thoughts?
Re: Naze32 hardware discussion thread
How to increase speed of reaction on stick input?
On naze32 there is so slow reaction comparing with other board. It has good reaction on rudder but not on aileron/elevator.
If to keep stick in position long enough copter can reach disired position but with lag.
I made few attempt to tune PID but it not help. Seems there have to be some parametr like "stick reaction speed".
n32 Green board with MPU 3050
PPM Graupner
On naze32 there is so slow reaction comparing with other board. It has good reaction on rudder but not on aileron/elevator.
If to keep stick in position long enough copter can reach disired position but with lag.
I made few attempt to tune PID but it not help. Seems there have to be some parametr like "stick reaction speed".
n32 Green board with MPU 3050
PPM Graupner
Re: Naze32 hardware discussion thread
You need to change the Roll/Pitch Rate in the Gui. Per default it is set to 0. For example, if you set it to 0.5 you'll have a much faster reaction.
-
felixrising
- Posts: 244
- Joined: Sat Mar 23, 2013 12:34 am
- Location: Australia
Re: Naze32 hardware discussion thread
timecop wrote:I was gonna make 4 more but then other shit happened.
So maybe next week. wtf do people use these for anyway?
For these http://www.rcgroups.com/forums/showthread.php?t=1562854 and these http://www.rcgroups.com/forums/showthread.php?t=1520875
Where every gram more is a few seconds less in the air...
Re: Naze32 hardware discussion thread
Problem of slow stick response resolved with increasing D up to 100 in Level section.
Re: Naze32 hardware discussion thread
Hi All,
Is there anyone connect xbee to naze32 board?
Please let me know, I am curious to do this. I have redundant xbee pro 900mhz kit. I tried to connect into tx/rx in middle board but could not connect it by GUI. Could I change the baudrate of xbee? and how much?
Please give me more details.
Thanks,
Duy
Is there anyone connect xbee to naze32 board?
Please let me know, I am curious to do this. I have redundant xbee pro 900mhz kit. I tried to connect into tx/rx in middle board but could not connect it by GUI. Could I change the baudrate of xbee? and how much?
Please give me more details.
Thanks,
Duy
Re: Naze32 hardware discussion thread
I don't think xbee can work faster than 57600 baud, so you will need to change serial_baudrate to that and save/reboot.
you can use the usual CTU-Util to change parameters on Xbee, including baudrate (bug again, I think 57600 is tops).
You might have to swap rx/tx pins depending what module youre using. If it doesn't work one way, swap them.
you can use the usual CTU-Util to change parameters on Xbee, including baudrate (bug again, I think 57600 is tops).
You might have to swap rx/tx pins depending what module youre using. If it doesn't work one way, swap them.
Re: Naze32 hardware discussion thread
Thanks timecop, you are correct.
Now I could connect xbee, GPS Ublox 6M from HK as well.
That's awesome board.
I have a question for you. Do you have any plan to port the code of arducopter to naze32?
There is a STM32 version of arducopter from Italy. Maybe you can play with it.
And I think the soft of arducopter is better.
It is just my idea, you can do what you want.
Thanks,
Duy
Now I could connect xbee, GPS Ublox 6M from HK as well.
That's awesome board.
I have a question for you. Do you have any plan to port the code of arducopter to naze32?
There is a STM32 version of arducopter from Italy. Maybe you can play with it.
And I think the soft of arducopter is better.
It is just my idea, you can do what you want
Thanks,
Duy
Re: Naze32 hardware discussion thread
.
what could be better for NAZE32 GPS
 - 36x36mm
- 36x36mm

- http://www.ebay.de/itm/271176495992
even the USB port is connected.

what could be better for NAZE32 GPS
even the USB port is connected.
-
chanyote66
- Posts: 5
- Joined: Wed Dec 12, 2012 8:50 pm
Re: Naze32 hardware discussion thread
Hey Timecop,
Im usually over on RCG... Just here for support with my Afromini mostly. I was wondering If there is a way to get a Tricopter configuration to work on the AfroMini? Im designing a Micro FPV tri and would love to use this board. The Naze32 will fit but it would be difficult.
I figured this is the closest place to post since it can use the same firmware... Will any Motors need to be remapped for the Afro?
Chris
Im usually over on RCG... Just here for support with my Afromini mostly. I was wondering If there is a way to get a Tricopter configuration to work on the AfroMini? Im designing a Micro FPV tri and would love to use this board. The Naze32 will fit but it would be difficult.
I figured this is the closest place to post since it can use the same firmware... Will any Motors need to be remapped for the Afro?
Chris
Re: Naze32 hardware discussion thread
It might just work, throttle 1 will be the servo and the 4 servo outputs will be for 3 motors + extra.
You can look at multiPPM and airPPM mappings in drv_pwm, i think it should just work.
You can look at multiPPM and airPPM mappings in drv_pwm, i think it should just work.
Re: Naze32 hardware discussion thread
hello,
i recently bought a naze32. everything is working great
but i have the feeling that my motor are nog giving full power.
My throttle range is from 1000-2000. so that is fine.
what is the max esc output on this board?
greetings.
i recently bought a naze32. everything is working great
but i have the feeling that my motor are nog giving full power.
My throttle range is from 1000-2000. so that is fine.
what is the max esc output on this board?
greetings.
Re: Naze32 hardware discussion thread
look in cli, maxthrottle is 1890 or so, you can change it to higher.
-
Crashpilot1000

- Posts: 631
- Joined: Tue Apr 03, 2012 7:38 pm
Re: Naze32 hardware discussion thread
@TC: I WANT YOUR OSD !
Re: Naze32 hardware discussion thread
dito, plus ...
Re: Naze32 hardware discussion thread
I have a new build that requires an OSD and gps unit as well....
the "AfroMini32" schematic ?
I miss the AfroMini32 schematic
and connection diagram for QUAD-X ?
Re: Naze32 hardware discussion thread
juergen, http://www.abusemark.com/downloads/glider_rev0.pdf
hookup for quadx is obvious.
hookup for quadx is obvious.