Hello,
I'm trying to set up my new Turnigy Evolution transmietter and TGY-iA6C receiver on my MultiWii SE V2.5.
so far I've controlled the FC using a python script that inject RC channel via MSP.
I read here https://hobbycomponents.com/rc/489-crius-se-25-multiwii-flight-controller that it supports PPM and here http://www.electronoobs.com/eng_robotica_tut5_3.php how to set it up.
so I checked the channels on the transmitter and they are:
ch1 yaw
ch2 pitch
ch3 throttle
ch4 roll
then I uncommented these line in the code of the MultiWii firmware acccording to the channels order:
#define SERIAL_SUM_PPM YAW,PITCH,THROTTLE,ROLL,AUX1,AUX2,AUX3,AUX4,8,9,10,11
#define PPM_ON_THROTTLE
then I uploaded it to the FC, I calibrated accelerometer and magnetometer, and I leave the default configuration to arm/disarm the motors.
the transmitter output mode is on PPM and I wired receiver's PPM pin to the FC's D2 pin, and obviously + and -.
but when I power on if I put the stick on yaw 2000 and throttle 1000 the motors don't arm, but the blu led keeps blinking as long as I hold the stick in that position.
what am I doing wrong?
Thanks
help setting up PPM on MultiWii
help setting up PPM on MultiWii
- Attachments
-
- wiring
-
- 0.jpg
- MultiWiiConf
- (15.49 KiB) Not downloaded yet
Re: help setting up PPM on MultiWii
The Board need to be level to ARM.
#define ONLYARMWHENFLAT //prevent the copter from arming when the copter is tilted
You can test to Arm with a AUX switch.
#define ONLYARMWHENFLAT //prevent the copter from arming when the copter is tilted
You can test to Arm with a AUX switch.
Re: help setting up PPM on MultiWii
PatrikE wrote:The Board need to be level to ARM.
#define ONLYARMWHENFLAT //prevent the copter from arming when the copter is tilted
You can test to Arm with a AUX switch.
I always was able to arm the motors using MSP before, I calibrated the accelerometer and the quad is flat on the floor.
I also tried to set on the transmitter the ch5 (aux1) to a 2 positions switch and then in MultiWiiConf I set arm on the high value of aux1 (that would even be safer) but it doesn't work.
- Attachments
-
- Senza-titolo-1.jpg
- (15.52 KiB) Not downloaded yet
Re: help setting up PPM on MultiWii
Inside void go_arm()
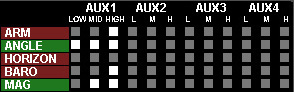
That means you can't ARM if Baro is enabled at same time.
Your image shows you have Baro enabled on same switch as ARM.
Code: Select all
if(!f.ARMED && !f.BARO_MODE) { // arm now!
f.ARMED = 1;
That means you can't ARM if Baro is enabled at same time.
Your image shows you have Baro enabled on same switch as ARM.
Re: help setting up PPM on MultiWii
Ok I'll try unchecking the BARO box this evening, but why with the switch on low position I could't arm using the sticks? if I check arm on aux arming by sticks is disabled? I already tried without checking anything in arm
Re: help setting up PPM on MultiWii
I tried but when I put the ch5 (aux1) switch on high level nothing happens...
the only thing I noticed is that while keeping the throttle stick on bottom right position, the blue LED on FC start blinkinhg very fast (it seems almost solid) then it pause , then it blinks again and so on, what does this mean? I didn't find it in the wiki
the only thing I noticed is that while keeping the throttle stick on bottom right position, the blue LED on FC start blinkinhg very fast (it seems almost solid) then it pause , then it blinks again and so on, what does this mean? I didn't find it in the wiki
- Attachments
-
- Senza-titolo-1.jpg
- (15.52 KiB) Not downloaded yet
Re: help setting up PPM on MultiWii
Hi,
It's strange that MAG is enabled without any box checked!.
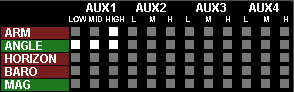
Is all channels within correct range(1000-2000)
Otherwise failsafe can be activated.
Also if you upgraded the software on the FC you should start with a Eeprom erase or at least reset from Gui.
Some old settings can interfere at a upgrade.
Then test to ARM without changing anything.
It's strange that MAG is enabled without any box checked!.
Is all channels within correct range(1000-2000)
Otherwise failsafe can be activated.
Also if you upgraded the software on the FC you should start with a Eeprom erase or at least reset from Gui.
Some old settings can interfere at a upgrade.
Then test to ARM without changing anything.