fauslyfox110 wrote:Hey Guys,
I can see when I move the levers on the transmitter, the levers in EZ config and multiwii config move so there is certainly a connection present, but I can't ARM the damn thing. I also tried controlling the quadcopter through the beta bluetooth controls on EZconfig.
I've troubleshooted, tried arming moving the left lever stick down the side to ARM, and got nothing. I also made sure the thresholds were setup properly and endpoints matched. i can see the yaw, pitch and throttle move on the multiwiiconfig, but I still can't arm and make the motors spin.
Turnigy transmitter is set to ACRO as I've read that with multiwii we shouldn't use Heli. I'm unsure what I should look into next, I'm sure I am making some newbie mistake here. Someone might be able to point me in the right direction. Appreciate the help guys!
There are at least three possibilities as to what is causing your issue, maybe even more, depending on how much you actually have right to begin with and not assuming everything crucial is done correctly. Lets assume everything crucial IS done correctly. The most probable and typically the most usual causes are.
1. If you don't have your config.h sketch arm/disarm statement set like this:
Code: Select all
/******************************** ARM/DISARM *********************************/
/* optionally disable stick combinations to arm/disarm the motors.
* In most cases one of the two options to arm/disarm via TX stick is sufficient */
#define ALLOW_ARM_DISARM_VIA_TX_YAW
//#define ALLOW_ARM_DISARM_VIA_TX_ROLL
2. Or, if your config.h sketch looks like this in the RX section:
Code: Select all
/******************************* SBUS RECIVER ************************************/
/* The following line apply only for Futaba S-Bus Receiver on MEGA boards or PROMICRO boards.
You have to invert the S-Bus-Serial Signal e.g. with a Hex-Inverter like IC SN74 LS 04 */
//#define SBUS PITCH,YAW,THROTTLE,ROLL,AUX1,AUX2,AUX3,AUX4,8,9,10,11,12,13,14,15,16,17 //
//#define SBUS ROLL,PITCH,THROTTLE,YAW,AUX1,AUX2,AUX3,AUX4,8,9,10,11,12,13,14,15,16,17 //
//#define RX_SERIAL_PORT 1
#define SBUS_MID_OFFSET 988 //SBUS Mid-Point at 1500
You need to re-comment the last part of that set of commands so it looks like this:
Code: Select all
/******************************* SBUS RECIVER ************************************/
/* The following line apply only for Futaba S-Bus Receiver on MEGA boards or PROMICRO boards.
You have to invert the S-Bus-Serial Signal e.g. with a Hex-Inverter like IC SN74 LS 04 */
//#define SBUS PITCH,YAW,THROTTLE,ROLL,AUX1,AUX2,AUX3,AUX4,8,9,10,11,12,13,14,15,16,17 //
//#define SBUS ROLL,PITCH,THROTTLE,YAW,AUX1,AUX2,AUX3,AUX4,8,9,10,11,12,13,14,15,16,17 //
//#define RX_SERIAL_PORT 1
//#define SBUS_MID_OFFSET 988 //SBUS Mid-Point at 1500
3. Or, you are making the most common beginners mistake of not having your TX set up properly. I can't really tell if this is your problem or not because none of your screenshots show the stick ranges. Endpoints and subtrims must be adjusted so that low stick is 1000, mid stick is 1500 and high stick is 2000. Here is a link to describe what I'm talking about.
http://www.multiwii.com/wiki/index.php? ... leshootingLook at the very first entry (does not arm). It describes what causes a lack of arming due to bad TX setup. Before making any adjustments to the subtrims and endpoints, center all four of your front panel physical trim switches and leave them centered. With the Turnigy, when the switch centers, it emits a longer beep. First, hookup to your GUI with the USB cable. To adjust the settings (1000, 1500, 2000) in the Turnigy use the endpoints menu for the high and low and subtrim menu for the midpoint while watching the adjustments in the GUI. After you make an adjustment on one, it will change the other two, so go back and reset things until they all balance out to being in the right spot (ie.1000, 1500, 2000) on both sticks in all four stick directions.
Also, I prefer to use Heli and not Acro on my TX (Turnigy 9x.) The person who wrote all that stuff about how you can't fly a quad with the Turnigy set to Heli just couldn't figure out how to make Heli work for him so he said it's a bad idea for everyone. I personally find Heli to be the easier of the two to set up and use and never use Acro. I fly three different quads all using the Heli setting on my 9x.
Anyway, back to your real issue. It will NEVER arm using the yaw command until you center (properly set up) your TX and not only that, if you don't get your sticks right you will have heap big trouble trying to fly.
If I had to choose which of the previous is the cause, I would say it is most likely the TX centering issue since 99.99 percent of beginner arming issues are due to that. My next guess would be the arming by yaw command is not enabled since it comes disabled by default and last, the SBUS_MID_OFFSET since it comes enabled by default and needs disabled to work with the Turnigy.
One more thing I noticed with your configurator screenshots is that your Pitch/Roll Rate PID is set to 1.00


That is like the most radical setting for that stick. You really would be better off when it's time to fly if you set that to around .35 or less.
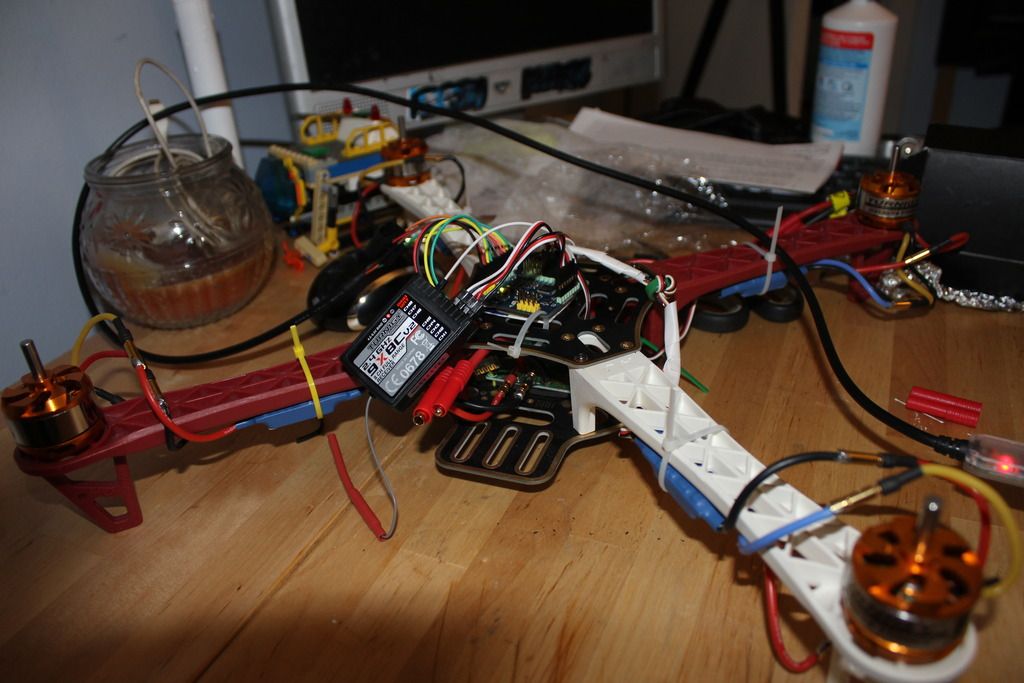
In your photo, you show bare uninsulated bullet connectors connected to your motors from your ESCs and from your PDB to the ESCs.


Not EVER a good idea even when just testing. All you gotta do is let two of those touch or short out the PDB to ESC connections by dropping a tool or something and you risk a fire with that li po battery or at the least a toasted ESC. Same with that Bluetooth module hanging down there by the PDB. You are risking a short circuit at the very least. I would disassemble everything wiring wise and use heat shrink tubing over all bare brass. While things are disassembled......
There are two white motor booms and two red motor booms so that they can be used as a sort of positioning help.

Normally, one builds these type of frames with two white next to each other and two red next to each other. Use either pair as the front and the other as the rear. Orient your FC to the front and rear the same way. Now, when you fly, you can use the colored pairs as a visual reference to direction of flight and you can tell if you are coming or going. This is best utilized with the QuadX configuration.
Also, using those tie wraps to hold the FC in place is probably not the best way to do that. Sure, vibration will be reduced but if the FC is out of alignment with the frame the quad will fly funny. You want your FC square with the frame. It should be far enough away from the PDB so no current issues arise. Most people mount theirs with nylon standoffs and bolts. I use a combination of standoffs, stainless bolts, and camera gimbal shock balls. Yours looks like it is not really square with the frame at all and it looks like it could even move around. The best way to avoid vibration issues is to balance your motor bells and props properly.