Hello
I have tried loads of things and searched for the answer, but what ever I try it has no effect.
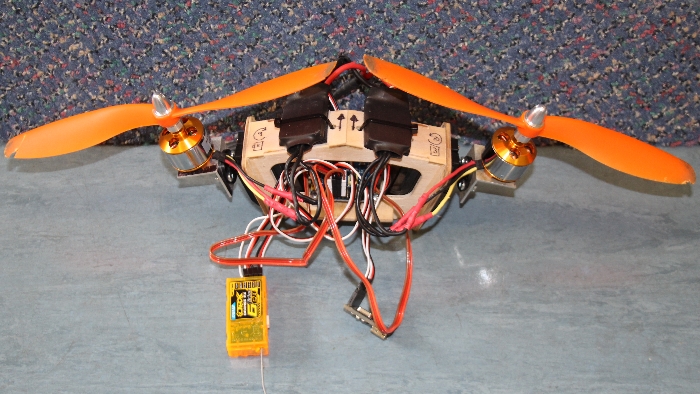
I have a working Hex and Quad, so thought I would try a Bi, however when I place the bi on the floor and attempt to take of it spins out of control. I can see that the servos are moving in the wrong direction and as soon as there is a little error, the correcting force is applied in the wrong direction and the error magnifies.
What do I need to change? I have tried Version 2.2 and 2.3 and still nothing?
Bicopter spinning out of control.
-
copterrichie
- Posts: 2261
- Joined: Sat Feb 19, 2011 8:30 pm
Re: Bicopter spinning out of control.
Did you try the following?
Code: Select all
#define YAW_DIRECTION 1
//#define YAW_DIRECTION -1 // if you want to reverse the yaw correction directionRe: Bicopter spinning out of control.
Hello And thanks for your reply.
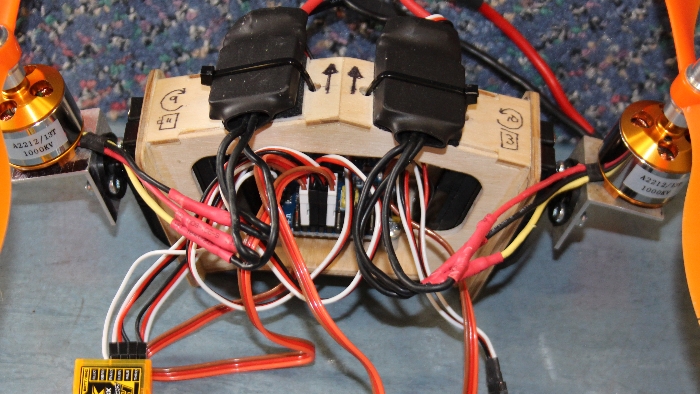
Yes I tried that, and lots more but nothing seemed to work!, in the end after spending 6+ hours trying to sort this out I took the servos out and reversed the servos (motor and feedback pots swopped around) which worked fine.
now I have a new set of problems!!!!!
More to follow.
Yes I tried that, and lots more but nothing seemed to work!, in the end after spending 6+ hours trying to sort this out I took the servos out and reversed the servos (motor and feedback pots swopped around) which worked fine.
now I have a new set of problems!!!!!
More to follow.
Re: Bicopter spinning out of control.
So I still have a lot of work to do, but you should be able to see what I am trying to do.
https://www.youtube.com/watch?v=eKz3iCDZS7Y&feature=youtu.be
https://www.youtube.com/watch?v=eKz3iCDZS7Y&feature=youtu.be
-
copterrichie
- Posts: 2261
- Joined: Sat Feb 19, 2011 8:30 pm
Re: Bicopter spinning out of control.
From what I see in the video, that is more of a mechanical linkage adjustment problem.
Secondly, the wobbling is PID
Secondly, the wobbling is PID
Re: Bicopter spinning out of control.
Hello
I will do another video tonight, as I have now managed to get it working quite well!
Now all I have to do if finish the bottom half and put a harness onto it so the action man can wear it!

I will do another video tonight, as I have now managed to get it working quite well!
Now all I have to do if finish the bottom half and put a harness onto it so the action man can wear it!
-
copterrichie
- Posts: 2261
- Joined: Sat Feb 19, 2011 8:30 pm
Re: Bicopter spinning out of control.
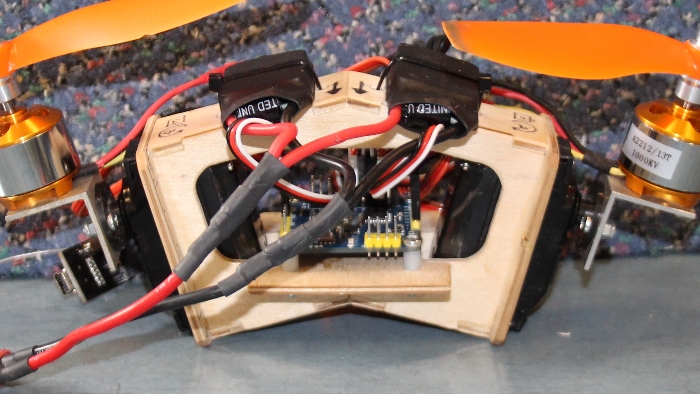
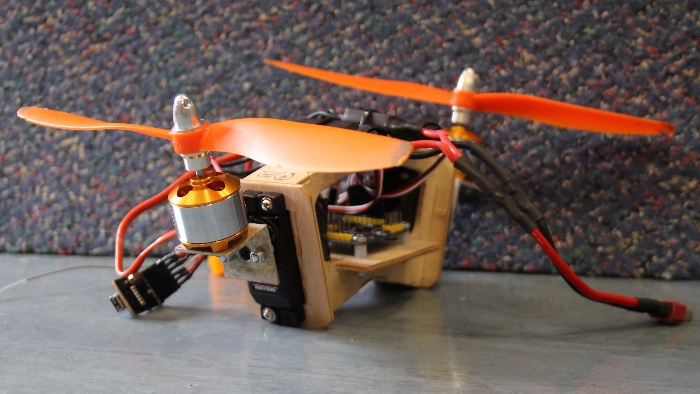
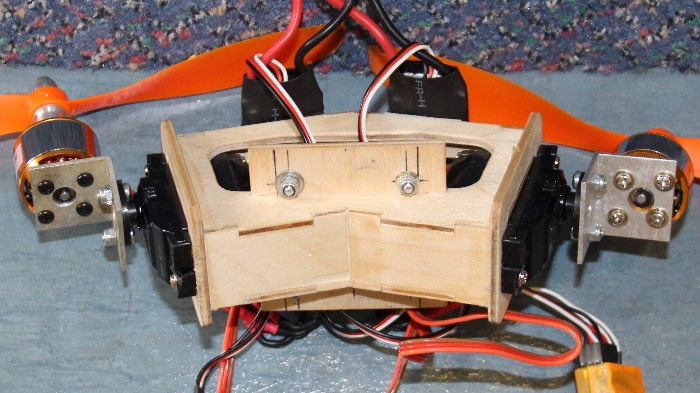
Very interesting design, in fact, this is the very first I have seen anything like this. My major concern is, the resolution of the servos in a direct drive configuration like this. My personal experience, 10 degree forward and aft is enough for an traditional bi-copter. I have done some experimenting with VOTL where the motors would rotate a full 90 degrees but nothing like this. I am curious to what brand of servos used here and the specs please.
-
copterrichie
- Posts: 2261
- Joined: Sat Feb 19, 2011 8:30 pm
Re: Bicopter spinning out of control.
P.S. I will have to verify this but I think there is only 200 steps in the PWM signal, I know this is true for the ESCs on Mega328p. So that would be 1000/200 giving each step 5. If the servos have a 120 degree range for a PWM 1000 to 2000 that would be 120 / 200 = .6 degrees per step. .6 degree of tilt may be too much for precision control. On my copters, I found I had to reduce this to 2 to 1 in the linkage and control horns however, I believe using a Mega2560 with Hardware PWM or a NAZE32 (been a long time since I used a naze32 for a bicopter), it maybe possible to improve the resolution.
Edited: I looked at the code, there are 250 steps, better resolution but still may not be enough for a direct drive system.
Edited: I looked at the code, there are 250 steps, better resolution but still may not be enough for a direct drive system.
Last edited by copterrichie on Tue Jul 08, 2014 2:40 pm, edited 1 time in total.
-
copterrichie
- Posts: 2261
- Joined: Sat Feb 19, 2011 8:30 pm
Re: Bicopter spinning out of control.
I made the following change to the MWC 2.2 output.ino file to reduce the YAW sensitivity.
Code: Select all
servo[4] = constrain(1500 + ((YAW_DIRECTION * axisPID[YAW]/2) + (BI_PITCH_DIRECTION * axisPID[PITCH])), 1020, 2000); //LEFT
servo[5] = constrain(1500 + ((YAW_DIRECTION * axisPID[YAW]/2) - (BI_PITCH_DIRECTION * axisPID[PITCH])), 1020, 2000); //RIGHT
Re: Bicopter spinning out of control.
I have managed to take a small video clip which should give you an idea of what it is like.
And as for the servos, they were what I had spare, Blue Bird BMS-631 Super Speed.
Weight: 43 grams / 1.52 oz.
Dimensions: 40.5 x 20 x 38.5 mm / 1.60 x 0.78 x 1.54 inch
Torque At 4.8V: 5.0kg-cm , 69 oz-in
Torque At 6.0V: 6.2kg-cm , 89 oz-in
Speed At 4.8V: 0.10 sec / 60° at no load
Speed At 6.0V: 0.08 sec / 60° at no load
http://www.hobbyking.co.uk/hobbyking/store/__8779__BMS_631_Super_Fast_Servo_5_0kg_10sec_43g.html
https://www.youtube.com/watch?v=DEMR_NAAq2c&feature=youtube_gdata
And as for the servos, they were what I had spare, Blue Bird BMS-631 Super Speed.
Weight: 43 grams / 1.52 oz.
Dimensions: 40.5 x 20 x 38.5 mm / 1.60 x 0.78 x 1.54 inch
Torque At 4.8V: 5.0kg-cm , 69 oz-in
Torque At 6.0V: 6.2kg-cm , 89 oz-in
Speed At 4.8V: 0.10 sec / 60° at no load
Speed At 6.0V: 0.08 sec / 60° at no load
http://www.hobbyking.co.uk/hobbyking/store/__8779__BMS_631_Super_Fast_Servo_5_0kg_10sec_43g.html
https://www.youtube.com/watch?v=DEMR_NAAq2c&feature=youtube_gdata
-
copterrichie
- Posts: 2261
- Joined: Sat Feb 19, 2011 8:30 pm
Re: Bicopter spinning out of control.
That is very impressive, from what I see, it is just a matter of more PID tuning. You should see some of my early development Bi-copter video.
Nice Job.
Nice Job.