I'm trying to build an quad+ with arduino pro mini and GY-86 (10DOF Module of China)
http://www.aliexpress.com/product-gs/591293815-GY-86-10DOF-MS5611-HMC5883L-MPU6050-module-MWC-flight-control-sensor-module-wholesalers.html
When I connect the board to the GUI, I increase the throttle. The first time, the motors all increase at the same rate but then the REAR and FRONT are increase, the LEFT and RIGHT are decrease.
The sensors and ESC are calibrated, what happen with my copter, I’m very crazy because I can’t take off…please help me! Thanks! Sorry for my poor English!
Motor Speed Problem!!!
-
tranhieu_hcmut
- Posts: 5
- Joined: Sat Aug 25, 2012 4:17 pm
Re: Motor Speed Problem!!!
This is the fist time

and then

and then
Re: Motor Speed Problem!!!
Cant believe no one answered you yet but I'll have a go. I have never seen this sort of problem before so its a shot in the dark for me, First make sure acc is off, it will try to make your copter go level but as you havnt told it what level is yet it doesnt know, does the problem still exist with the acc off. If so try moving two motors, a front one and a side one if the problem moves then you have a problem with motors, but if the problem is now on two motors two motors next to each other i.e a front one and a side one then you might be able to level the motor rpms by using the Tx trim. You will really only know for sure if you have fixed by flight test and getting it to hover, then you can see about setting the acc to give to you level mode, I found the inflight calibration routine a far easier method than the old fly, land, adjust and fly again method.
Just had a thought are all your channel outputs on your Tx the same i.e 100 or 125, I seem to remember someone with a similar problem and it turned out to be his transmitter was not giving the same reading on one channel as it was on the other channels. You could always test you motors one by one to measure the thrust produced by each motor, google thrust measurement or make a simple see saw device with the motor at one end and some measuring device (kitchen scales) at the other end.
Just had a thought are all your channel outputs on your Tx the same i.e 100 or 125, I seem to remember someone with a similar problem and it turned out to be his transmitter was not giving the same reading on one channel as it was on the other channels. You could always test you motors one by one to measure the thrust produced by each motor, google thrust measurement or make a simple see saw device with the motor at one end and some measuring device (kitchen scales) at the other end.
-
jevermeister

- Posts: 708
- Joined: Wed Jul 20, 2011 8:56 am
- Contact:
Re: Motor Speed Problem!!!
have you tried it in reality yet?

Re: Motor Speed Problem!!!
Greetings,
Looking at your screen shots I see that in both the motor values for front and rear are identical. Are you sure the software is properly configured for your copter. I'd suggest that a re-compile and eeprom clear could be needed but I have no idea why.
hth David.
Looking at your screen shots I see that in both the motor values for front and rear are identical. Are you sure the software is properly configured for your copter. I'd suggest that a re-compile and eeprom clear could be needed but I have no idea why.
hth David.
Re: Motor Speed Problem!!!
I would also make sure your ESC's have been calibrated please refer to this... http://code.google.com/p/multiwii/wiki/ESCsCalibration
-
tranhieu_hcmut
- Posts: 5
- Joined: Sat Aug 25, 2012 4:17 pm
Re: Motor Speed Problem!!!
I've tried it in reality and my copter tilts/flips over when I try to take off, sometimes my copter spins around 180 degrees all by itself! I think my motors is ok because I've used it with arducopter control board and my arduCopter flies okay, sometimes in the GUI I got I2C error and then i close COM port and reconnect then everything is ok.
ESC's have been calibrated like this: I will try again...thanks for your help!
ESC's have been calibrated like this:
Code: Select all
http://code.google.com/p/arducopter/wiki/AC2_ESCRe: Motor Speed Problem!!!
for starters, it looks like your board is set up for Quad + instead of the standard Quad X, is this intentional? (nothing wrong if it is, just verifying because its unusual) for a X your board front would be between the 2 front motors, for + your board would face the only front motor. I use a GY-86 on a paris board with a X configuration. the only times ive ever seen mine flip is when i had 2 ESC's crossed at the board side, or my props placed wrong.
double check your wiring, and if it seems correct, using low throttle hold your copter in hand and lean it one way or another and see if the motors spin up to try to level you, make sure the correct motor is trying to compensate.
make sure all 4 props are pushing air DOWN, not up! if not, then check the following 2 things
1. make sure your motors are spinning the proper direction
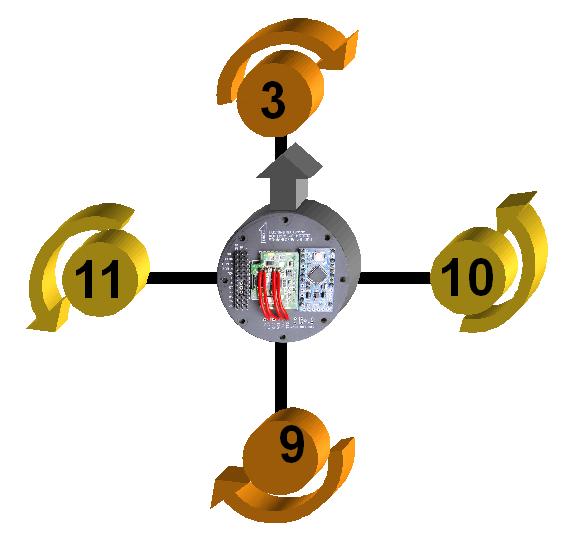
for a + config
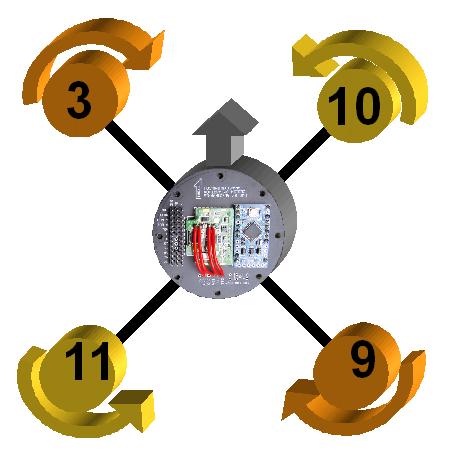
for a X config.
2. make sure you are using 2 reverse props (push), and 2 normal (tractor) Props, placed on the correct motors (I believe the reverse ones always go on 3 and 9, but am not at my copter to verify right now)
double check your wiring, and if it seems correct, using low throttle hold your copter in hand and lean it one way or another and see if the motors spin up to try to level you, make sure the correct motor is trying to compensate.
make sure all 4 props are pushing air DOWN, not up! if not, then check the following 2 things
1. make sure your motors are spinning the proper direction
for a + config
for a X config.
2. make sure you are using 2 reverse props (push), and 2 normal (tractor) Props, placed on the correct motors (I believe the reverse ones always go on 3 and 9, but am not at my copter to verify right now)
-
tranhieu_hcmut
- Posts: 5
- Joined: Sat Aug 25, 2012 4:17 pm
Re: Motor Speed Problem!!!
after ESC's have been calibrated, my copter still flips over when I try to take off
the fist time...maybe OK
http://www.youtube.com/watch?v=NFxV8_1XH9c
the second time is very bad
http://www.youtube.com/watch?v=c0Rbzgw8WsY
my room is very small, I forced my copter by a rope...
I'm afraid to fly! Should I change PID???
the fist time...maybe OK
http://www.youtube.com/watch?v=NFxV8_1XH9c
the second time is very bad
http://www.youtube.com/watch?v=c0Rbzgw8WsY
my room is very small, I forced my copter by a rope...
I'm afraid to fly! Should I change PID???
Re: Motor Speed Problem!!!
im confused, this looks very promising. you cant judge anymore from 6 inches off the ground. you are getting too much ground wash affecting your copter that low.
you need to take it outside and get it in the air now, at least 3 feet high, and see how it flies, but both your videos look great for what it is.
I believe it will at least fly, right now.
LEAVE ALL SENSORS TURNED OFF FOR NOW, except your gyro which is always on anyway. get it in the air before worrying about calibrating and tuning the extra sensors!
you need to take it outside and get it in the air now, at least 3 feet high, and see how it flies, but both your videos look great for what it is.
I believe it will at least fly, right now.
LEAVE ALL SENSORS TURNED OFF FOR NOW, except your gyro which is always on anyway. get it in the air before worrying about calibrating and tuning the extra sensors!
-
tranhieu_hcmut
- Posts: 5
- Joined: Sat Aug 25, 2012 4:17 pm
Re: Motor Speed Problem!!!
"LEAVE ALL SENSORS TURNED OFF FOR NOW, except your gyro which is always on anyway. get it in the air before worrying about calibrating and tuning the extra sensors!"
My IMU include: MPU6050+HMC5883L+MS5611
your mean is i will turn off HMC5883L+MS5611 right? why?
Thank you so much!
My IMU include: MPU6050+HMC5883L+MS5611
your mean is i will turn off HMC5883L+MS5611 right? why?
Thank you so much!
Re: Motor Speed Problem!!!
just make sure that you dont have them enabled during initial flights, because they have to be calibrated, but you cant calibrate them properly until you have at least the minimum of flight control first, plus they make it difficult to resolve vibration issues.
if you havent enabled them within the gui, by either tying them to your RC switches, or making them permanently on, they generally wont be enabled automatically.
if you havent enabled them within the gui, by either tying them to your RC switches, or making them permanently on, they generally wont be enabled automatically.