I'm really new to all this. I never had a brushless motor and ESC before.
I want to build a QuadX but I'm not sure how to connect the ESC and the RX.
Questions:
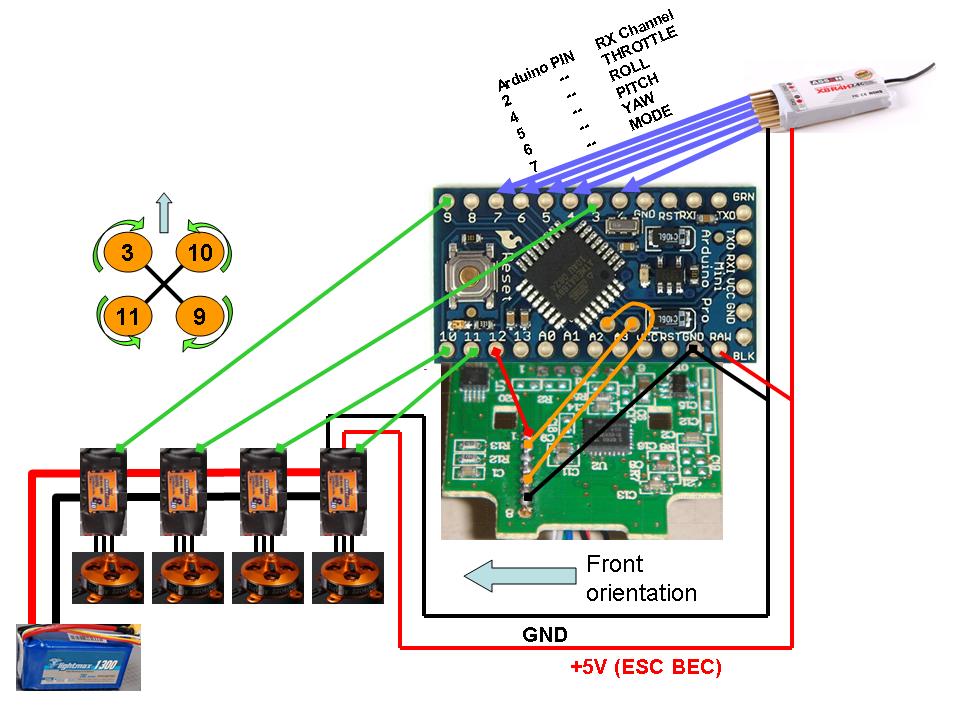
1. According to this image, does it means that all four motors are in series?
2. There's 3 wires from ESC to RX, but here, it seems that only one (green) is connected to the arduino. What about the red/black wires?
3. We use the red/black wires from the last ESC to power up the RX on the batt pins and the arduino board?
4. There's 3pins for each channels on the RX, but here, it seems that only one (blue) is connected to the arduino. What about the red/black wires?
Build questions:
On the electronic side, I need breakout pins, servo lead, anything else?
RC Questions:
I know that I need CW and CCW props. But do we need to reverse polarity for the motor to rotate CCW?
Thank you so much everyone
Seb
