
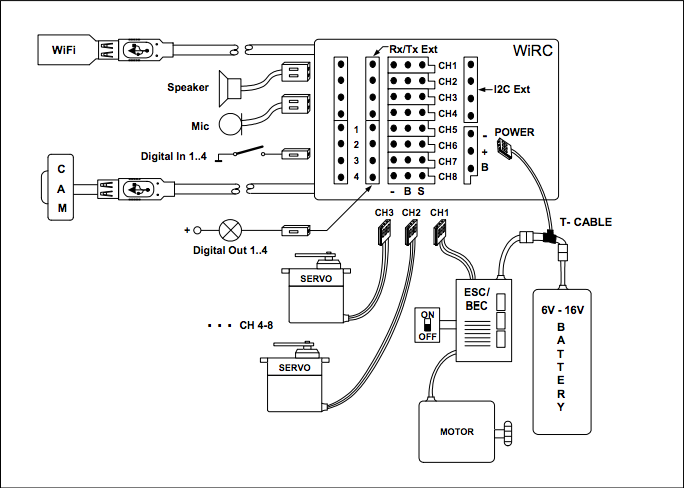
The goal is to control the quadcopter directly from my iPhone. The control board is Arduino Rev 3 with IMU GY80 and software Multiwii. The connections from the manual of Wirc are shown in the second picture:

I thought the connections in this way:
• every ESC to PWM pin of Arduino (3,9,10 e 11)
• the channels of Wirc receiver to the pin 7,5,6,4,2 to Arduino
• + and - of Wirc to the Li-Po battery
• + and - of the regulator to the pin 11 and GND of Arduino
I would know if the connections are correct and how can I associate the throttle, pitch, yar and roll to the channels of Wirc?