Frequencies in MultiWii
Posted: Tue Jul 05, 2011 11:01 am
Hello,
I'm building my quad and struggling to put it in the air. Yesterday I measured frequencies with regards to the image in FAQ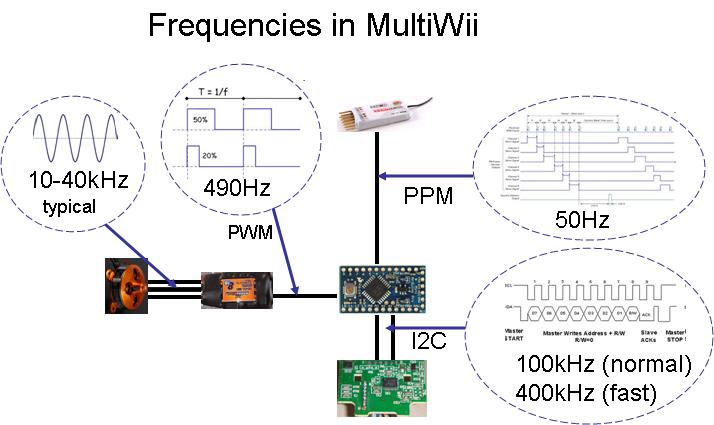 .
.
First I'm gonna outline my components:
Motors: Hacker Style Brushless Outrunner 20-22L
ESC: Turnigy Basic 18A
TX/RX: Hobby King 2.4Ghz 4Ch and 6Ch Tx & Rx V2 (Mode 2)
Sensors: HMC5883L BMA180 BMP085 ITG3200 sensor board 5V LLC
Major question is: does PWM duty cycle between Arduino and ESC at minimum position should be at 50% and maximum at 20%? I've measured and got at minimum position with motors armed
minimum 45%
maximum on full throttle around 80%
Looks like it's upside down, do you recon it's valid? In any case motors spin speed variation is seemingly corect!
Also recently I read a thread about Hobby King TX/RX (couldn't find the thread any more), however that thread was about minimum and maximum values! Since I use the same TX/RX, I had to increase the min and max to 120%, I also measured PPM between Hobby King RX and Arduino, and I got 45.2Hz instead of normal 50Hz,
also wondering would it affect the control of the firmware altogether?!
at last, the frequency between the motor and ESC is 4.42Hz and looks to me is not according to the specified 10-40KHz
Please if you have any comments or feedback and see is there anything that is off the limits, your suggestions would help to make my copter airborne:)
Best Regards,
Rihards
I'm building my quad and struggling to put it in the air. Yesterday I measured frequencies with regards to the image in FAQ
. First I'm gonna outline my components:
Motors: Hacker Style Brushless Outrunner 20-22L
ESC: Turnigy Basic 18A
TX/RX: Hobby King 2.4Ghz 4Ch and 6Ch Tx & Rx V2 (Mode 2)
Sensors: HMC5883L BMA180 BMP085 ITG3200 sensor board 5V LLC
Major question is: does PWM duty cycle between Arduino and ESC at minimum position should be at 50% and maximum at 20%? I've measured and got at minimum position with motors armed
minimum 45%
- PWM Min
maximum on full throttle around 80%
- PWM Max
Looks like it's upside down, do you recon it's valid? In any case motors spin speed variation is seemingly corect!
Also recently I read a thread about Hobby King TX/RX (couldn't find the thread any more), however that thread was about minimum and maximum values! Since I use the same TX/RX, I had to increase the min and max to 120%, I also measured PPM between Hobby King RX and Arduino, and I got 45.2Hz instead of normal 50Hz,
also wondering would it affect the control of the firmware altogether?!
- Hobby King 2.4Ghz RX PPM
at last, the frequency between the motor and ESC is 4.42Hz and looks to me is not according to the specified 10-40KHz
- F between motor and ESC
Please if you have any comments or feedback and see is there anything that is off the limits, your suggestions would help to make my copter airborne:)
Best Regards,
Rihards