Hi,
I can't see register link either.
Only login option.
latest new member is from 1:st juli -17.
Maybe Alex locked for new registration to avoid the spam we had at that time?.
Search found 1976 matches
- Wed Aug 01, 2018 7:20 am
- Forum: General discussions
- Topic: How to register for this forum?
- Replies: 4
- Views: 13824
- Sat May 05, 2018 8:13 pm
- Forum: Getting Started - MultiWii config and setup
- Topic: How to change servo output to pwm/fet motor control
- Replies: 4
- Views: 4620
Re: How to change servo output to pwm/fet motor control
A tip can be to search for "brushed" in config.h
- Wed Mar 21, 2018 12:50 pm
- Forum: Software development
- Topic: Direct motor control on a quad FC
- Replies: 3
- Views: 5212
Re: Direct motor control on a quad FC
Hi I'm not sure what you want to do but this will not be a flyable thing as it is!... Just 4 separately controlled motors. rcCommand[x] have a range of -500 to 500 and center is zero so you have to add MIDRC to get it in correct range. motor[0] = rcCommand[ROLL] + MIDRC; rcData[x] is the "Raw&q...
- Wed Oct 04, 2017 12:47 pm
- Forum: Software development
- Topic: MWii development beyond v2.4
- Replies: 73
- Views: 57542
- Wed Oct 04, 2017 12:44 pm
- Forum: Software development
- Topic: Three independent, stick selectable settings in EEPROM
- Replies: 36
- Views: 20269
Re: Three independent, stick selectable settings in EEPROM
It's not active by default In config.h
Just enable and it will work in 2.4.
https://github.com/multiwii/multiwii-fi ... ig.h#L1012
Just enable and it will work in 2.4.
Code: Select all
/************* Support multiple configuration profiles in EEPROM ************/
//#define MULTIPLE_CONFIGURATION_PROFILEShttps://github.com/multiwii/multiwii-fi ... ig.h#L1012
- Wed Apr 05, 2017 6:40 pm
- Forum: Software development
- Topic: VTOL Quadcopter Fixed Wing Hybrid *ASSISTANCE NEEDED*
- Replies: 1
- Views: 3943
Re: VTOL Quadcopter Fixed Wing Hybrid *ASSISTANCE NEEDED*
Looks like another project we done here..
viewtopic.php?f=16&t=6287
I have code for it if you want..
The model is Quadwing and the transaction is made by AUX2 if i remember correct
https://www.dropbox.com/s/wwz9tue205nx10j/QW.rar?dl=0
/Patrik
viewtopic.php?f=16&t=6287
I have code for it if you want..
The model is Quadwing and the transaction is made by AUX2 if i remember correct
https://www.dropbox.com/s/wwz9tue205nx10j/QW.rar?dl=0
/Patrik
- Sat Jan 28, 2017 8:37 pm
- Forum: Shields, boards and sensors
- Topic: Arduino UNO R3 or FC
- Replies: 4
- Views: 9449
Re: Arduino UNO R3 or FC
The two components is enough for building a flight controller. It's easier to use a commercial FC though. I started at the time hacking MWii controller was the only way to go. Most of my fails during flying have been those Fc's failing, Soldered cables vibrating off and similar issues. A ready FC al...
- Mon Oct 24, 2016 2:48 pm
- Forum: Shields, boards and sensors
- Topic: MW + ATmega328 = coaxial drone?
- Replies: 9
- Views: 5631
Re: MW + ATmega328 = coaxial drone?
A 328 will be good enough until you start adding GPS etc.
Then it will be short of memory.
But you can easily config the setup and test to compile in Arduino ide to get a Idé of sketch size.
Then it will be short of memory.
But you can easily config the setup and test to compile in Arduino ide to get a Idé of sketch size.
- Mon Oct 24, 2016 7:41 am
- Forum: Shields, boards and sensors
- Topic: MW + ATmega328 = coaxial drone?
- Replies: 9
- Views: 5631
Re: MW + ATmega328 = coaxial drone?
Maybe not plug n play but it's something to start with.
- Sun Oct 23, 2016 9:36 pm
- Forum: Shields, boards and sensors
- Topic: MW + ATmega328 = coaxial drone?
- Replies: 9
- Views: 5631
Re: MW + ATmega328 = coaxial drone?
Should be possible to use the Dual Copter Mix.
- Fri Oct 14, 2016 5:38 pm
- Forum: General discussions
- Topic: Many people here still flying Multiwii?
- Replies: 11
- Views: 6635
Re: Many people here still flying Multiwii?
MultiWii is still my first choice in my planes.
- Tue Sep 20, 2016 10:16 am
- Forum: Boards
- Topic: Crius v2.5 need Hard reset (hardware bridge... )!
- Replies: 2
- Views: 6507
Re: Crius v2.5 need Hard reset (hardware bridge... )!
If you Short the GND and RST the board will reboot.
- Tue Sep 06, 2016 10:45 am
- Forum: ESCs, propellers , servos and radios
- Topic: motor spin after arming
- Replies: 1
- Views: 2623
Re: motor spin after arming
You need to calibrate the esc's.
Default setting in MWii is that motors spin at idle when it's ARMED.
Uncomment to change it.
#define MOTORSTOP
Default setting in MWii is that motors spin at idle when it's ARMED.
Uncomment to change it.
#define MOTORSTOP
- Tue Sep 06, 2016 10:42 am
- Forum: Software development
- Topic: GPG and Compass heading recorded via PWM signal
- Replies: 2
- Views: 1850
Re: GPG and Compass heading recorded via PWM signal
I guess a good start would be a Openlog. ex m And add a combined GPS/Mag. ex m You can probably find cheaper on Ebay You might have to solder some directly on the processor legs to get it to work though!. You need I2C for the Mag and a input for PWM/PPM on the Openlog. Most of the code you need is a...
- Tue Sep 06, 2016 8:18 am
- Forum: General discussions
- Topic: MultiWii 32bit SW for VTOL - please advise
- Replies: 3
- Views: 10437
Re: MultiWii 32bit SW for VTOL - please advise
Eclipse is open source and free.
Keil have a free version that have a limit size on compiler.
But there's always ways to unlock for the handy man..
Keil have a free version that have a limit size on compiler.
But there's always ways to unlock for the handy man..
- Mon Sep 05, 2016 7:14 am
- Forum: General discussions
- Topic: MultiWii 32bit SW for VTOL - please advise
- Replies: 3
- Views: 10437
Re: MultiWii 32bit SW for VTOL - please advise
You can use Eclipse to code.
It's not the easiest to setup though!
Easiest is to use Kiel light version.(32kb limit)
http://www2.keil.com/mdk5/install
And use gcc to compile as a free option.
Baseflight works nicely with Kiel or Eclipse.
Cleanflight with Eclipse
It's not the easiest to setup though!
Easiest is to use Kiel light version.(32kb limit)
http://www2.keil.com/mdk5/install
And use gcc to compile as a free option.
Baseflight works nicely with Kiel or Eclipse.
Cleanflight with Eclipse
- Sat Aug 27, 2016 8:34 pm
- Forum: Software
- Topic: Airplane RTH BaseFlight
- Replies: 143
- Views: 138015
Re: Airplane RTH BaseFlight
You can do like that. But the FC will never know it's in failsafe and continue to circle at home until the battery runs flat. A better option is to trim down Throttle to absolute minimum and save it as failsafe. leave all other channels neutral. You can probably trim it to around 990µs or lower. Adj...
- Tue Aug 23, 2016 5:21 pm
- Forum: Boards
- Topic: Naze32 hardware discussion thread
- Replies: 3249
- Views: 1430252
Re: Naze32 hardware discussion thread
No.
Multiwii is not compatible with NAZE32 Boards.
Better to get a Mwiii fc.
Multiwii is not compatible with NAZE32 Boards.
Better to get a Mwiii fc.
- Tue Aug 16, 2016 8:53 pm
- Forum: Software
- Topic: Airplane RTH BaseFlight
- Replies: 143
- Views: 138015
Re: Airplane RTH BaseFlight
Sorry.
I don't have any experience of using Softserial.
But GPS should be OK to run at 38500 since only 5Hz is used.
I have been running a NMEA at 36k on MWii FixedWing.
Or you could just connect a push button as a jumper easy accessable.
I don't have any experience of using Softserial.
But GPS should be OK to run at 38500 since only 5Hz is used.
I have been running a NMEA at 36k on MWii FixedWing.
Or you could just connect a push button as a jumper easy accessable.
- Wed Jul 27, 2016 10:49 pm
- Forum: Software development
- Topic: Collision advoidance
- Replies: 4
- Views: 2667
Re: Collision advoidance
You need to insert your code before the PID regulator.
https://github.com/multiwii/multiwii-fi ... .cpp#L1467
The paramerers you should manipulate is.
rcCommand[PITCH] += pitch_advoidance_Command
rcCommand[ROLL] += roll_advoidance_Command
rcCommand[THROTTLE] += hrottle_advoidance_Command
rcCommand[YAW] += yaw_advoidance_Command
https://github.com/multiwii/multiwii-fi ... .cpp#L1467
The paramerers you should manipulate is.
rcCommand[PITCH] += pitch_advoidance_Command
rcCommand[ROLL] += roll_advoidance_Command
rcCommand[THROTTLE] += hrottle_advoidance_Command
rcCommand[YAW] += yaw_advoidance_Command
- Tue Jul 19, 2016 6:59 am
- Forum: Getting Started - MultiWii config and setup
- Topic: PITCH DIRECTION REVERSED ON MY MWC GIMBAL
- Replies: 5
- Views: 2258
Re: PITCH DIRECTION REVERSED ON MY MWC GIMBAL
There's servo Tab in the MWiiGui to.
Then you can connect it to PC normally.
Then you can connect it to PC normally.
- Fri Jul 15, 2016 7:10 am
- Forum: Getting Started - MultiWii config and setup
- Topic: dynabalance
- Replies: 2
- Views: 1383
Re: dynabalance
Upload the code as usually with dynabalance activate temporarily in config.h Open Motors Tab in Gui. It's not visible in normal mode. Enable the motor you want to test in the Gui and run the motor from gui. Do i have to mention the risk of running motors with props on the bench? Comment dynabalance ...
- Fri Jul 08, 2016 7:21 am
- Forum: Getting Started - MultiWii config and setup
- Topic: Why do my motors immediately arm?
- Replies: 7
- Views: 3132
Re: Why do my motors immediately arm?
In config.h
If your FC is sending 1000 and the motors is still running i guess your esc's need calibration.
Code: Select all
#define MINTHROTTLE 1150 // Idle speed when armed without #define MOTOR_STOP
#define MINCOMMAND 1000 // value sent when motors is stopped/DisArmedIf your FC is sending 1000 and the motors is still running i guess your esc's need calibration.
- Tue Jun 28, 2016 10:29 am
- Forum: ESCs, propellers , servos and radios
- Topic: anyone seen a Non pwm transmitter from arduino and nrf24l01
- Replies: 1
- Views: 2580
Re: anyone seen a Non pwm transmitter from arduino and nrf24
Hi,
There was a project for a couple of years ago on google code .
You can find it cloned on several places on Github
https://github.com/search?utf8=%E2%9C%9 ... rchresults
There was a project for a couple of years ago on google code .
You can find it cloned on several places on Github
https://github.com/search?utf8=%E2%9C%9 ... rchresults
- Mon Jun 27, 2016 2:30 pm
- Forum: General discussions
- Topic: This is what an ingrate says in PMs
- Replies: 4
- Views: 3138
Re: This is what an ingrate says in PMs
Sorry to hear... Trolls are everywhere and there's been a couple around here the past years. But they usually don't hang around long. From what i have seen You have been nothing but helpful to many appreciating forum members. Some people tend assume this is a "off the shelf product". The b...
- Tue Jun 14, 2016 7:05 am
- Forum: General discussions
- Topic: reading rx signal strength (pwm)
- Replies: 2
- Views: 2717
Re: reading rx signal strength (pwm)
RX_RSSI is reading one of the incoming RC-channels as RSSI value.
You can add your RSSI to ex channel 8 with the range (1000 - 2000) like a normal servo PWM signal.
You can also read PWM with analog filtering like in your link.
The analog will remap voltage in to RSSI value instead.
You can add your RSSI to ex channel 8 with the range (1000 - 2000) like a normal servo PWM signal.
You can also read PWM with analog filtering like in your link.
The analog will remap voltage in to RSSI value instead.
- Sat Jun 11, 2016 9:31 am
- Forum: Software development
- Topic: MWii development beyond v2.4
- Replies: 73
- Views: 57542
Re: MWii development beyond v2.4
you can find the stable releases here.
https://code.google.com/archive/p/multiwii/
they should all work on a 328.
2.4 can be tight to fit with too many sensors though.
but without Gps and baro it should work.
https://code.google.com/archive/p/multiwii/
they should all work on a 328.
2.4 can be tight to fit with too many sensors though.
but without Gps and baro it should work.
- Tue Jun 07, 2016 8:51 pm
- Forum: Shields, boards and sensors
- Topic: i2C GPS NEO-6 WEIRD ERROR Message
- Replies: 7
- Views: 3731
Re: i2C GPS NEO-6 WEIRD ERROR Message
gregd72002 wrote:why would I want to do so?
Actually you need to remove
static const
and leave
Code: Select all
float _filter = 7.9577e-3; // Set to "1 / ( 2 * PI * f_cut )";Because newer Arduino IDE does not support it like older did.
Or downgrade the Arduino IDE.
- Sun Jun 05, 2016 12:29 am
- Forum: Shields, boards and sensors
- Topic: i2C GPS NEO-6 WEIRD ERROR Message
- Replies: 7
- Views: 3731
Re: i2C GPS NEO-6 WEIRD ERROR Message
Try to remove "const"
- Wed May 25, 2016 5:18 am
- Forum: Software development
- Topic: [bug] MWii 2.4 - Mongoose support broken
- Replies: 3
- Views: 2336
Re: [bug] MWii 2.4 - Mongoose support broken
I also ave a Mongoose so i will look at it and apply a fix.
Haven't thought much about it even though it't my most used FC.
It's perfect format for small airplanes.
Haven't thought much about it even though it't my most used FC.
It's perfect format for small airplanes.
- Fri Apr 29, 2016 7:00 am
- Forum: Software
- Topic: [SOLVED] Burn bootloader on Crius Multiwii SE
- Replies: 4
- Views: 9270
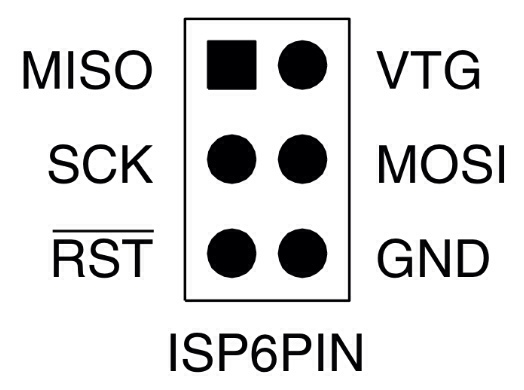
Re: Burn bootloader on Crius Multiwii SE
This is the connections on a Crius SE
- Tue Apr 26, 2016 7:19 am
- Forum: Software
- Topic: [SOLVED] Burn bootloader on Crius Multiwii SE
- Replies: 4
- Views: 9270
- Wed Apr 20, 2016 4:09 pm
- Forum: Software development
- Topic: How to change value PWM in program
- Replies: 3
- Views: 2094
Re: How to change value PWM in program
umma13 wrote:Is not there any other settings in the program? What is meant by MSP
You can send via MSP.
There's a separate msp for Rc.
Must be sent with about 20Hz update.
- Sat Apr 02, 2016 10:52 am
- Forum: General discussions
- Topic: Flying car help
- Replies: 26
- Views: 14554
Re: Flying car help
Just as a fun note on this old thread...
After almost 4 years this exists as a product!..
Let's agree we are a bit innovative!
Not as cool as a Humvee Quad anyway!...
http://www.gearbest.com/rc-quadcopters/ ... ign=FB1511
After almost 4 years this exists as a product!..
Let's agree we are a bit innovative!
Not as cool as a Humvee Quad anyway!...
http://www.gearbest.com/rc-quadcopters/ ... ign=FB1511
- Tue Mar 29, 2016 6:57 am
- Forum: General discussions
- Topic: VTOL with mwii ?
- Replies: 1
- Views: 1562
Re: VTOL with mwii ?
Not by default.
You need to custom build a mixer to handle it.
It's not complicated but takes some knowledge about the code.
If you can present some info i can probably help you to setup the mixer.
You need to custom build a mixer to handle it.
It's not complicated but takes some knowledge about the code.
If you can present some info i can probably help you to setup the mixer.
- Sun Mar 20, 2016 4:49 pm
- Forum: Getting Started - MultiWii config and setup
- Topic: HELP!! MultiWii 2.3 sending 2000 to motors :((((
- Replies: 1
- Views: 1477
Re: HELP!! MultiWii 2.3 sending 2000 to motors :((((
Start with clearing Eeprom.
There can can be some old scrap left..
There can can be some old scrap left..
- Thu Mar 17, 2016 7:38 am
- Forum: Getting Started - MultiWii config and setup
- Topic: version 2.2 woun't open on windows vista?
- Replies: 3
- Views: 2579
Re: version 2.2 woun't open on windows vista?
To edit and upload MWii to a Flight Controller you need to open the source code in the Arduino IDE.
https://www.arduino.cc/en/Main/Software
File/open then open the mwii file int the project.
https://www.arduino.cc/en/Main/Software
File/open then open the mwii file int the project.
- Wed Mar 16, 2016 5:21 pm
- Forum: General discussions
- Topic: recover the roll and pitch values
- Replies: 5
- Views: 3441
Re: recover the roll and pitch values
WinGui and EZ gui have log functions that can save the telemetry data during the flight.
A Bluetooth or another wireless Telemetry link is needed though.
A Bluetooth or another wireless Telemetry link is needed though.
- Fri Mar 11, 2016 4:27 pm
- Forum: Software
- Topic: Airplane RTH BaseFlight
- Replies: 143
- Views: 138015
Re: Airplane RTH BaseFlight
It's just a change to integer in the code instead of Float!.
100% equals 1.0
No i have not flown iNav just made some bench tests of it.
I don't like the behaviour of the PID's it use though!..
It behaves more like a copter!
Will maybe test it when summer temperatures return.
100% equals 1.0
No i have not flown iNav just made some bench tests of it.
I don't like the behaviour of the PID's it use though!..
It behaves more like a copter!
Will maybe test it when summer temperatures return.
- Thu Mar 10, 2016 5:57 pm
- Forum: Ideas
- Topic: arduino quadcopter using bluetooth hc-05 and android phone
- Replies: 3
- Views: 5914
Re: arduino quadcopter using bluetooth hc-05 and android pho
Together with EZ-gui It should work without changes in MWII.
- Thu Mar 03, 2016 12:22 am
- Forum: Software
- Topic: Airplane RTH BaseFlight
- Replies: 143
- Views: 138015
Re: Airplane RTH BaseFlight
Load the latest dev and not the stable...
The servos is broken in the stable version!..
The servos is broken in the stable version!..
- Wed Feb 10, 2016 7:44 am
- Forum: Getting Started - MultiWii config and setup
- Topic: autonomous flight - GPS waypoint on regular cc3d (not revo)
- Replies: 1
- Views: 1999
Re: autonomous flight - GPS waypoint on regular cc3d (not re
In Baseflight there's no autonomous flight.
You can look at the iNAV branch of cleanflight.
http://www.rcgroups.com/forums/showthread.php?t=2495732
You can look at the iNAV branch of cleanflight.
http://www.rcgroups.com/forums/showthread.php?t=2495732
- Wed Jan 20, 2016 7:47 pm
- Forum: Getting Started - MultiWii config and setup
- Topic: changing the angle of PITCH
- Replies: 4
- Views: 2294
Re: changing the angle of PITCH
umma13 wrote:if there is the influence of changing the tilt angle? to number 500 above it mean anything?
500 is 50 degrees.
Change it to 50 and it should limit the Tilt angle to 5 degrees.
- Wed Jan 20, 2016 8:18 am
- Forum: Getting Started - MultiWii config and setup
- Topic: changing the angle of PITCH
- Replies: 4
- Views: 2294
Re: changing the angle of PITCH
Hi, Do you mean the Max allowed angle for PITCH/ROLL in Angle Mode? It's set static to 50 degrees in Multiwii.cpp and limits both Axis. if (f.ANGLE_MODE || f.HORIZON_MODE) { // axis relying on ACC // 50 degrees max inclination errorAngle = constrain(rc + GPS_angle[axis], -500,+500 ) - att.angle[axis...
- Tue Jan 12, 2016 10:04 am
- Forum: MultiWii tweaking - flying experience
- Topic: Change default mode in MWii 2.4 to Horizon
- Replies: 4
- Views: 4249
Re: Change default mode in MWii 2.4 to Horizon
No It will force Horizon if not Angle is set by AUX.
- Sun Jan 03, 2016 12:16 pm
- Forum: MultiWii tweaking - flying experience
- Topic: Change default mode in MWii 2.4 to Horizon
- Replies: 4
- Views: 4249
Re: Change default mode in MWii 2.4 to Horizon
Nothing will save you after a brownout! The Gyros can not calibrate during the reboot since it's moving... But to force HorizonMode... In MultiWii.cpp Row 1085 is a blank row. Insert rcOptions[BOXHORIZON] = true; That should lock the controller in Horizon Mode Should look like this. for(i=0;i<CHECKB...
- Fri Jan 01, 2016 1:50 pm
- Forum: Software development
- Topic: MultiWii EZ-GUI
- Replies: 1434
- Views: 724014
Re: MultiWii EZ-GUI
Upper right corner, nect to "Connect"
Press the three dot's to open a dropdown menu
Press the three dot's to open a dropdown menu
- Wed Dec 30, 2015 11:38 am
- Forum: Software development
- Topic: MSP_SET_RAW_RC not working
- Replies: 6
- Views: 4324
Re: MSP_SET_RAW_RC not working
No you can control entirely with MSP_SET_RAW_RC . Rc gets overridden by MSP_SET_RAW_RC if the channel value is >0. In fact you can run RC in parallel with msp. Msp will act as a Dual command master. ex. handle the flight with RC and AUX with msp. Send msp channels as zero if you want RC to control t...
- Tue Dec 29, 2015 1:09 pm
- Forum: Software development
- Topic: MSP_SET_RAW_RC not working
- Replies: 6
- Views: 4324
Re: MSP_SET_RAW_RC not working
I have played around a little before to make a GroundStation/Variometer.
Have a MSP Rc transmitter built in to it.
It's a Arduino project but you might get some Idés from it.
Have a MSP Rc transmitter built in to it.
It's a Arduino project but you might get some Idés from it.
- Mon Dec 21, 2015 11:39 am
- Forum: Software development
- Topic: MSP_SET_RAW_RC not working
- Replies: 6
- Views: 4324
Re: MSP_SET_RAW_RC not working
Have not looked any closer at your code but...
You must send MSP_SET_RAW_RC repeatedly with a ~20hz timer.
You must send MSP_SET_RAW_RC repeatedly with a ~20hz timer.